Hi,
What data and TF are in your rosbags? If you are gonna mapping again, TF /map -> /odom should not be in the bag. If you are recomputing odometry, TF /odom -> /base_link (or /base_footprint) should not be in the bag either.
$ rosbag info mybag.bag
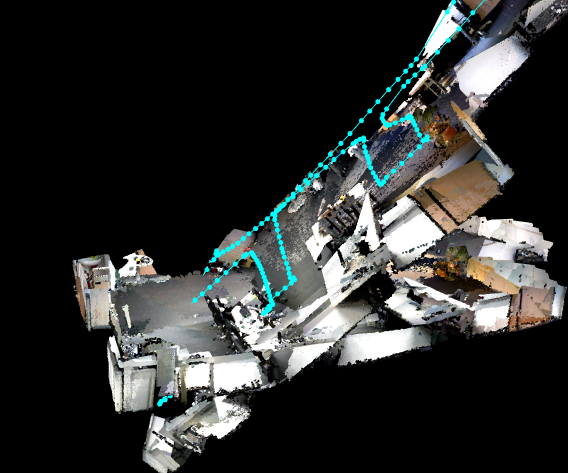
A tilted map like this from visual odometry means generally that the camera is tilted to ground and that
frame_id is not set to base frame of the robot (/base_footprint or /base_link) or TF between /base_link and /xtion_link (the frame of the camera) is wrong. Try
<arg name="frame_id" value="base_link" /> <!-- well, the fixed frame of your robot base -->
There should not be two maps at the same time, unless your started two rtabmap. Is the bottom one from the rosbag?
cheers