Hello,
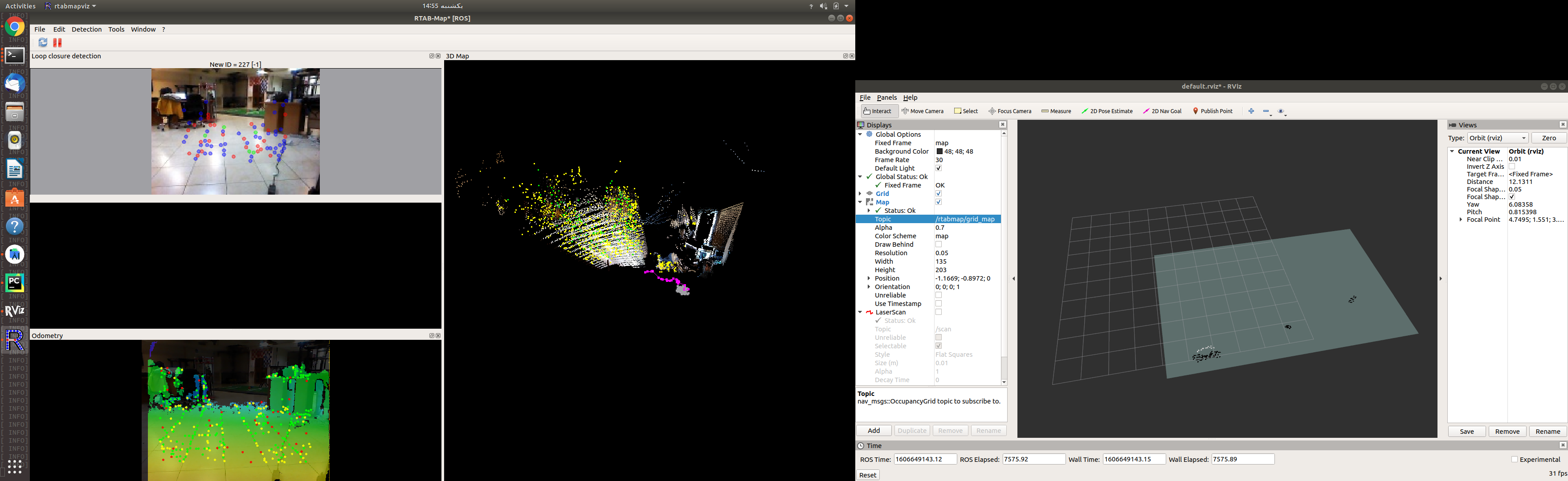
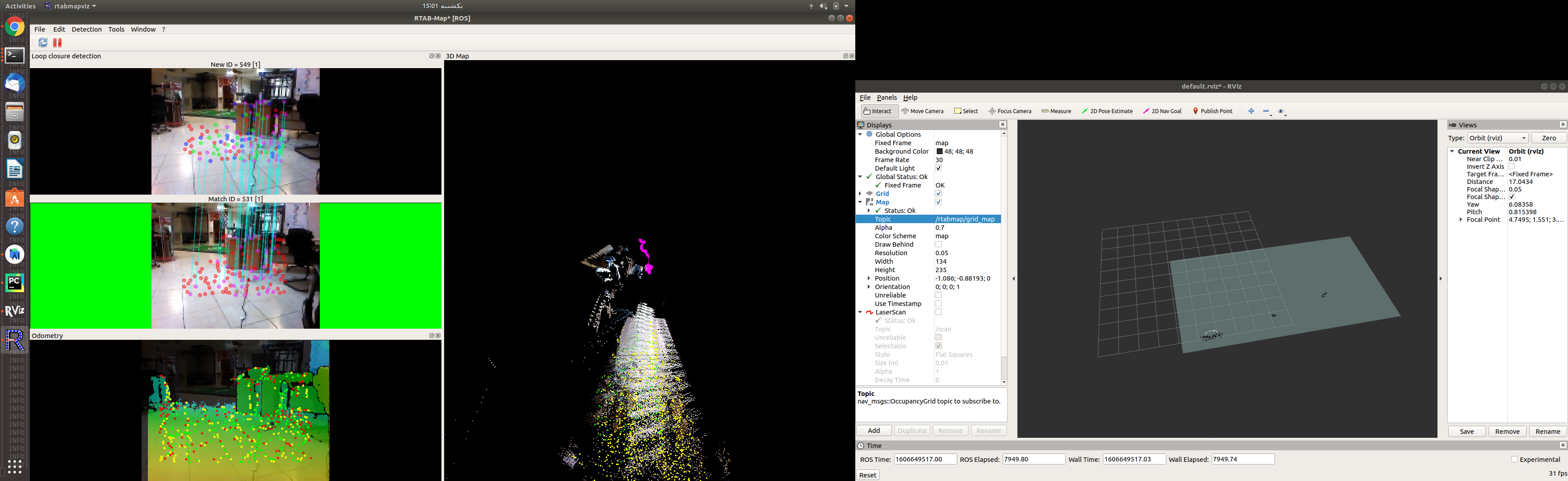
I am using Rtabmap for SLAM on a mobile robot. I am using Kinect Only method for mapping and localization and I am using a different 3D camera for my robot, to be specific I am sending depth and rgb frames in 10-15 fps with 320x240 resolution from robot to server which rtabmap is running on. The problem is when I start to mapping no map is generating but it shows point clouds in rtabmap windows which is twisted together. I dont know what the problem is.
Can you please help me ?
Sorry for image size, It's very wide and I think you should scroll more on the sides.