Hello Matthieu!
First of all, thank you so much your great work on RTAB-Map and your continuous support of the community. Much appreciated!
ContextI am trying to develop a UAV navigation stack as part of my PhD thesis. I recently integrated RTAB-Map and apart from some minor (probably tuning-related) issues (walls appearing doubled in the simulations) it seems like a good match for my application.
But a problem appeared when I tried to use the OctoMap output in a large outdoor scenario as input for a frontier-based exploration algorithm (which I adapted from other researchers). In essence, it looks for frontier cells (free cells neighboring unknown cells) in a given exploration volume, clusters them, calculates a score for each cluster based on expected information gain and distance, and chooses the best one as the drone's next goal. In my application, it should terminate when a minimum percentage of the volume was explored.
QuestionThis requires the underlying SLAM solution to
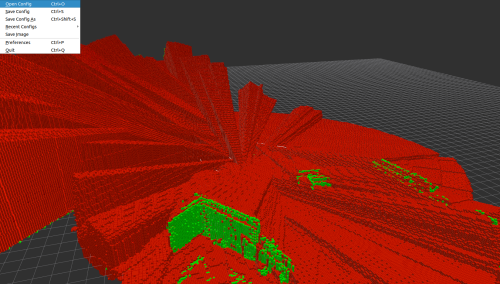
explicitly map free cells. With the Grid/RayTracing parameter, RTAB-Map does this for each cell along rays between the sensor and obstacles. But it doesn't do this for any other direction where no obstacle was hit, e.g. towards the sky. See the screenshot for an example.
Now I was wondering, do you think there is a sensible way to add this functionality to RTAB-Map?
I suspect tracing all rays on every map update would be too expensive, so a downsample might have to do. But what would otherwise be necessary? Could, for example, sensor updates trigger tracing for (some) rays which exceeded the maximum range without interfering with the rest of the map update process? Thought I'd better ask for your opinion on this before starting time-consuming experiments on my own =)
I looked into
OctoMap.cpp but could not understand it's inner workings 100% yet. If you find the time, some additional code documentation would certainly be appreciated!
Many thanks and regards,
Merlin

