Hi,
sorry for the delay, I've been quite busy the past days. I am able to run correctly the rosbag, so not sure what was the problem on your side (I am using latest rtabmap version). Here is what I did:
1) removed map -> zed_left_camera_optical_frame using this
script (output.bag -> output_without_map_frame.bag)
2) tf_static is missing from the bag, I had to add them manually. I guessed the tilt of the camera. The position between the lidar and camera is 0,0,0, but should be probably something else.
3) run:
roslaunch rtabmap_ros rtabmap.launch \
args:="-d" \
stereo:=true \
left_image_topic:=/zed/zed_node/rgb/image_rect_color \
left_camera_info_topic:=/zed/zed_node/rgb/camera_info \
right_image_topic:=/zed/zed_node/right/image_rect_color \
right_camera_info_topic:=/zed/zed_node/right/camera_info \
use_sim_time:=true \
frame_id:=base_link \
subscribe_scan_cloud:=true \
rgbd_sync:=true \
scan_cloud_topic:=/Sensor/points \
approx_rgbd_sync:=false \
approx_sync:=true
# base to lidar
$ rosrun tf static_transform_publisher 0 0 0 0 0 0 base_link Sensor 100
# base to camera
$ rosrun tf static_transform_publisher 0 0 0 0 -0.2 0 base_link camera_link 100
# optical rotation
$ rosrun tf static_transform_publisher 0 0 0 -1.5707963267948966 0 -1.5707963267948966 camera_link zed_left_camera_optical_frame 100
# run the bag from 8 sec (before that there are no scans)
rosbag play --clock -s 8 output_without_map_frame.bag
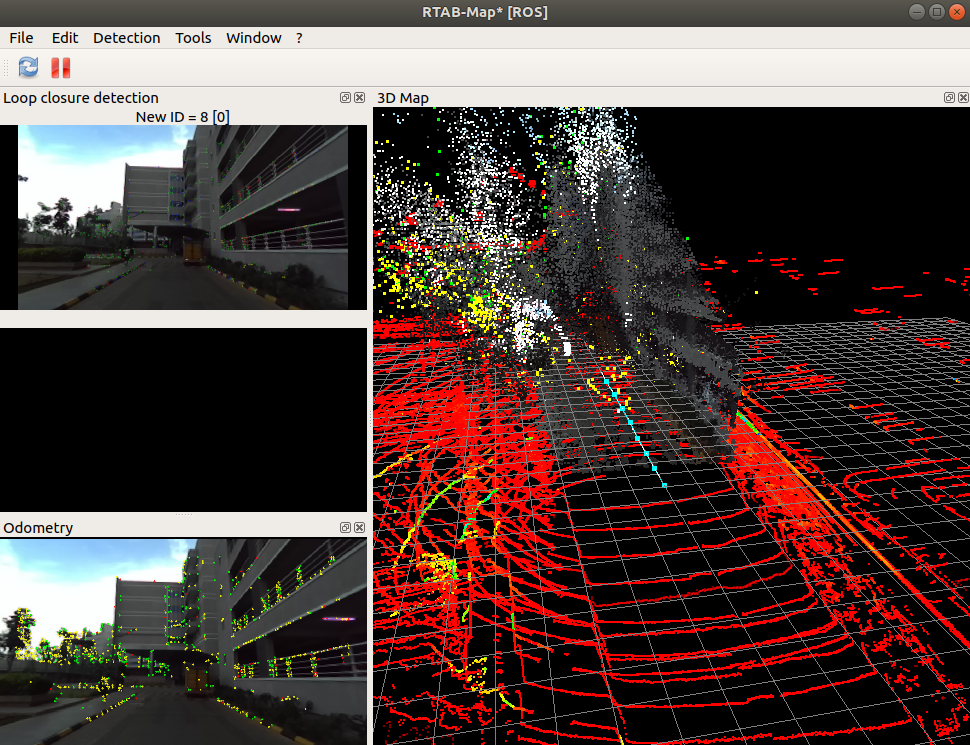
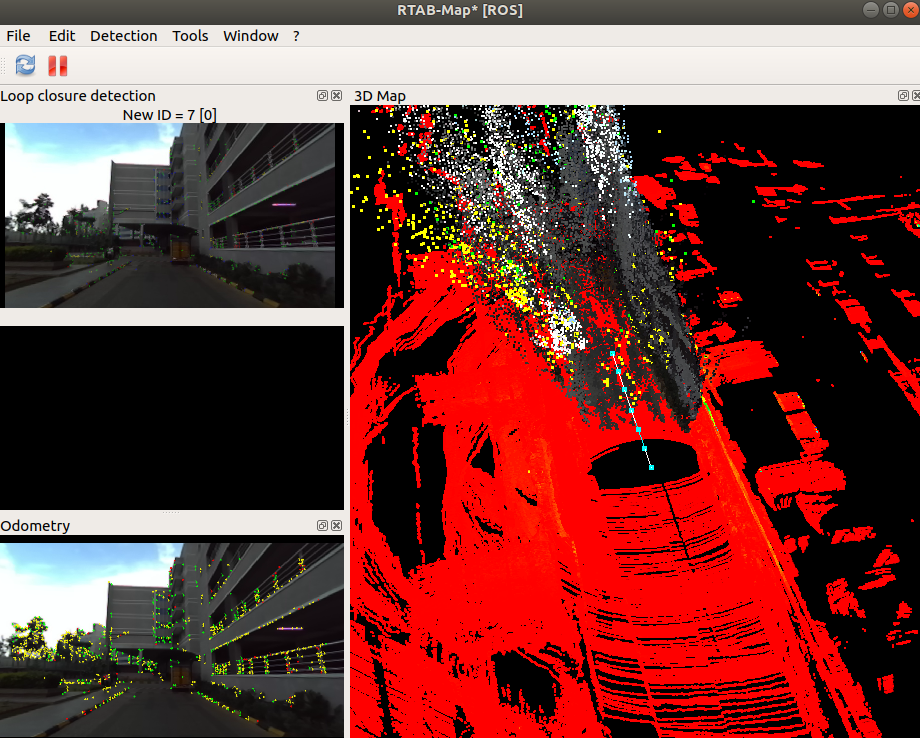
We can see the trajectory in cyan, the red are the scans.
UPDATEIf you want to record all lidar scan in the map without updating the map too fast (default 1 Hz), we can use rtabmap_ros/point_cloud_assembler nodelet to assemble 10 lidar scans, then make rtabmap subscribe to assembled cloud. As the assembled cloud is published at 1 Hz (scans are 10 Hz), we can set Rtabmap/DetectionRate to 0. We will still have the 1 Hz map update but with all scans.
roslaunch rtabmap_ros rtabmap.launch \
args:="-d --Rtabmap/DetectionRate 0" \
stereo:=true \
left_image_topic:=/zed/zed_node/rgb/image_rect_color \
left_camera_info_topic:=/zed/zed_node/rgb/camera_info \
right_image_topic:=/zed/zed_node/right/image_rect_color \
right_camera_info_topic:=/zed/zed_node/right/camera_info \
use_sim_time:=true \
frame_id:=base_link \
subscribe_scan_cloud:=true \
rgbd_sync:=true \
scan_cloud_topic:=/assembled_cloud \
approx_rgbd_sync:=false \
approx_sync:=true
# base to lidar
$ rosrun tf static_transform_publisher 0 0 0 0 0 0 base_link Sensor 100
# base to camera
$ rosrun tf static_transform_publisher 0 0 0 0 -0.2 0 base_link camera_link 100
# optical rotation
$ rosrun tf static_transform_publisher 0 0 0 -1.5707963267948966 0 -1.5707963267948966 camera_link zed_left_camera_optical_frame 100
# assemble scans
$ rosrun nodelet nodelet standalone rtabmap_ros/point_cloud_assembler _max_clouds:=10 _fixed_frame_id:=odom cloud:=/Sensor/points _wait_for_transformation:=1
# run the bag from 8 sec (before that there are no scans)
rosbag play --clock -s 8 output_without_map_frame.bag
cheers,
Mathieu

