Dear people.
I do have a ZED camera and a Jetson TX2 mounted on a drone. I have taken the drone with my hands to map an outdoor place by means of the rtabmap_ros node.
I have been trying to map big areas where I got some distortions during mapping as you can see in this link:
http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-ros-outdoor-3D-mapping-td6104.html#a6117However, I made a very simple test. I have put the drone on a wheel chair and i turned the chair to complete a circle.
And I can see the following.
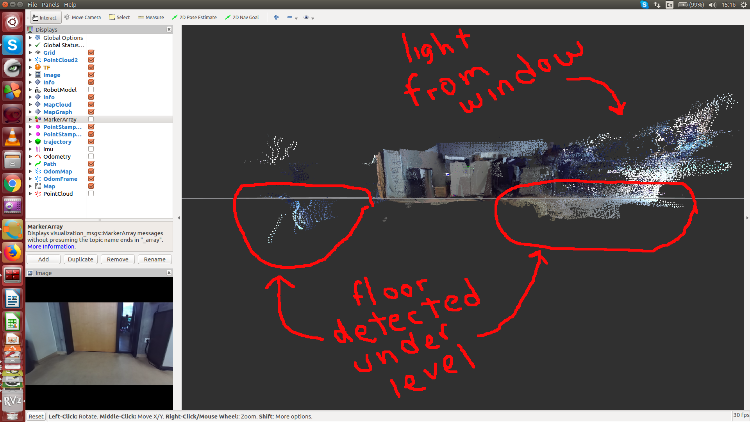
* when the zed is looking at the window it detects the the reflected light on the floor and plots the floor under the ground in RVVIZ.
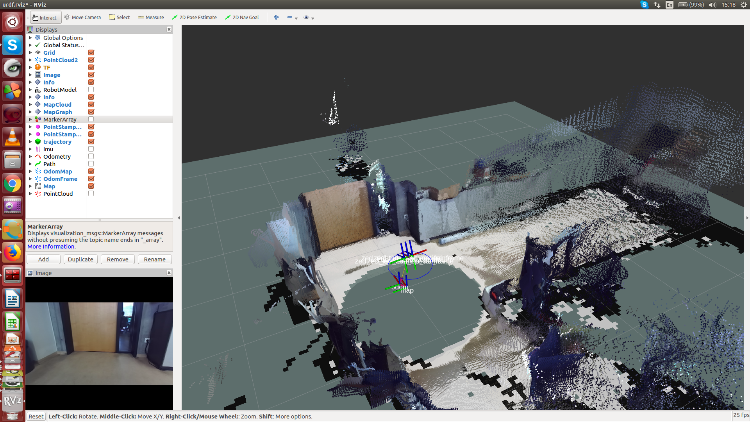
* When the zed is turning it detects multiple walls.

I share a rtabmap.db just in case :)
http://www.fit.vutbr.cz/~plascencia/rtabmap_lab.db
I just calibrated the zed camera by means of matlab and tested the calibration by means of opencv, The calibration looks good :)
If you need I can share the launch file or if there is any parameter i need to tune or what can i do to have a good 3D mapping.
I am looking forward to your replay.

