Hi Matlabbe
Many thanks for your help every time.
Our table scene includes some bottles, cans, and cylinders. The length of object is about 0.3-0.5 meter.
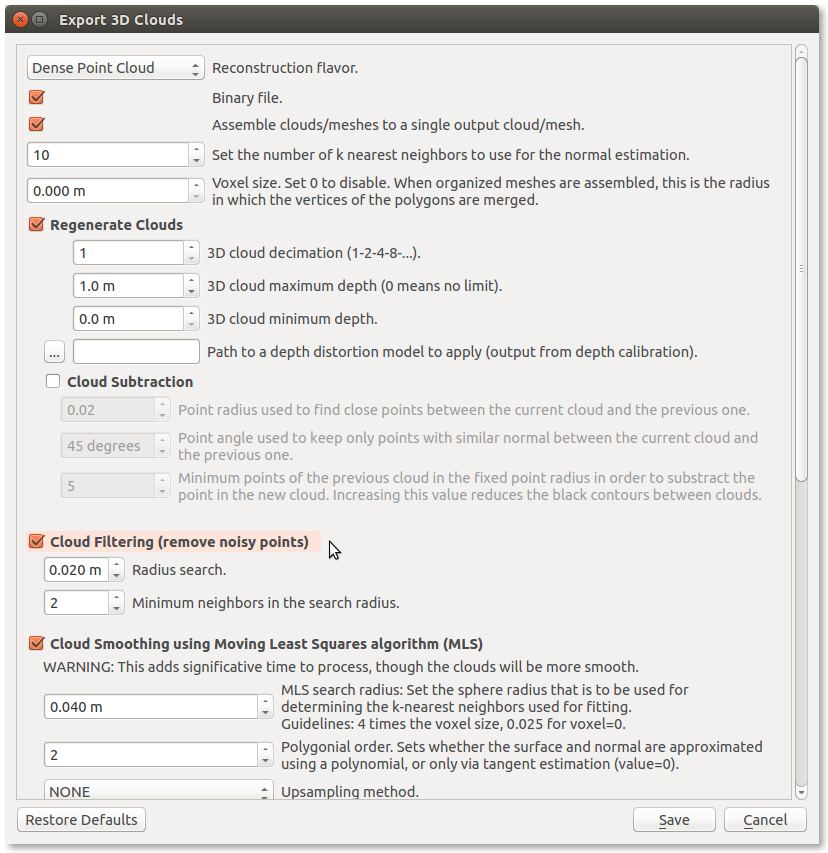
We set parameters: decimation 1 and maximum distance 1m . The point cloud is performed by outlier filter, smoothing. Finally, we got some very good 3D object models.
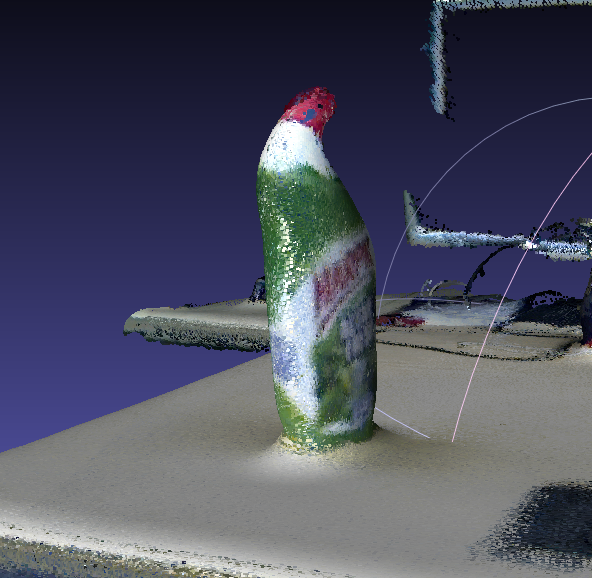
We found that: Xtion can get more accurate 3D model for the object in about 0.5-1.5 meter. Kinect2 are more accurate for long distance reconstruction like reconstruction the whole room. When we use kinect2 for 3D reconstruction for the object in near place, there are always many outlier and missed point clouds in the object.
Do you have some suggestions?
Best Wishes