Thank you for your explanation, but I am still having trouble understanding how to use this. The EKF node is usually set up to take odometry and IMU data, but I don't want to use that data. Instead, I am using GPS as the ground truth for RTAB-Map to compare the trajectory of visual odometry with the robot's actual trajectory and calculate the RMSE. I followed your instructions and created the launch file below:
<launch>
<rosparam command="load" file="$(find hada_navigation)/params/hada_ekf_config.yaml" />
<node pkg="robot_localization" type="ekf_localization_node" name="ekf_se_map" clear_params="true">
<!-- <remap from="odometry/filtered" to="odometry/filtered_map"/> -->
</node>
<!--node pkg="tf" type="static_transform_publisher" name="base_gps" args="0 0 0 0 0 0 /base_link_gt /gps 100"/-->
<node pkg="robot_localization" type="navsat_transform_node" name="navsat_transform_node" respawn="true" output="screen">
<rosparam command="load" file="$(find hada_navigation)/params/hada_navsat_config.yaml" />
<remap from="/imu/data" to="/gps/navheading" />
<remap from="/gps/fix" to="/ublox_gps/fix" />
<param name="wait_for_datum" value="false" />
</node>
</launch>However, I’m still not getting the TF between the world frame and gps_frame_gt. Also, I’m confused about where to change the topic in the EKF node. I tried changing it in the YAML file, but it didn’t work for me.
Here is the transform tree:
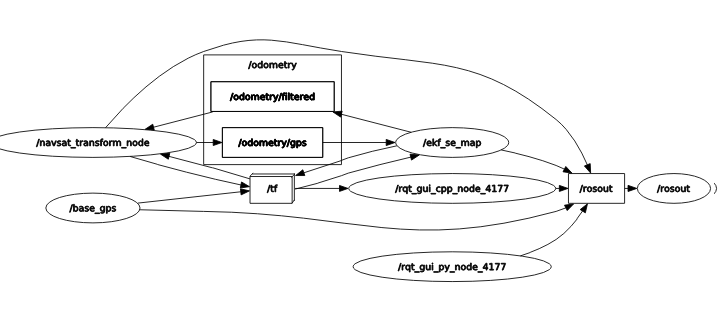
frames.pdfHere is the rqt_graph picture :
rosgraph.svgI would really appreciate it if you could assist me.
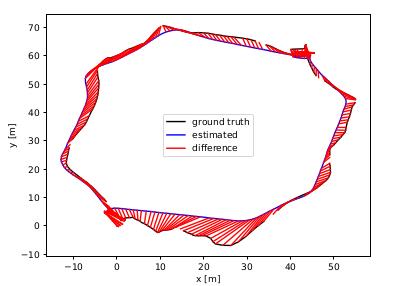
Actually, I am currently analyzing the RTAB-Map results generated using stereo odometry and require ground truth values to compare the accuracy and evaluate the performance of the map. If you have any alternative methods or suggestions to compare mapping accuracy, I would appreciate your guidance.
Thank You