Hi Mathieu,
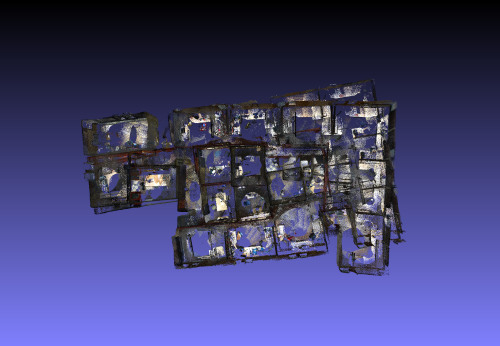
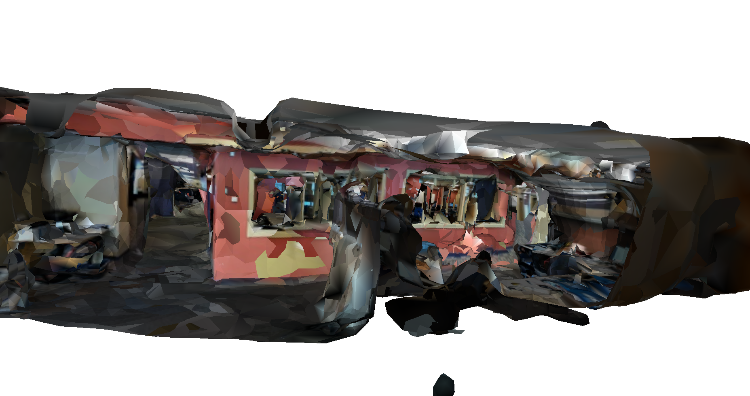
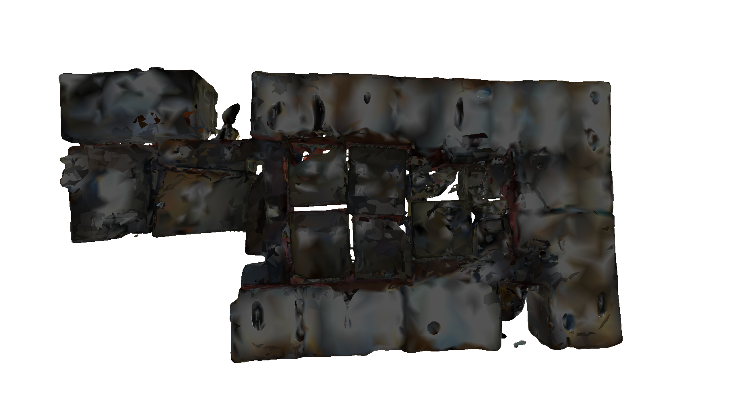
Thanks for sharing the information of meshing! I updated the rtabmap to 0.11.14 on Linux, and outputed the meshed files for several times. Here is one typical result I obtained, the roof is still there. I guess something has been missed. Here is one result
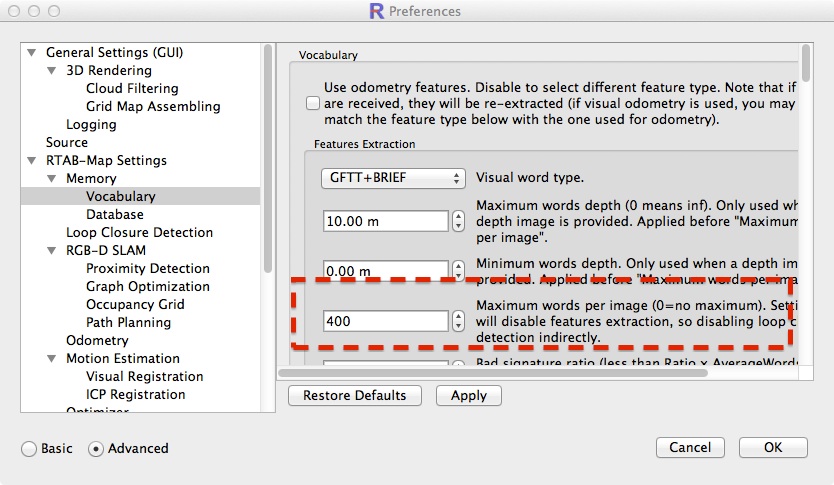
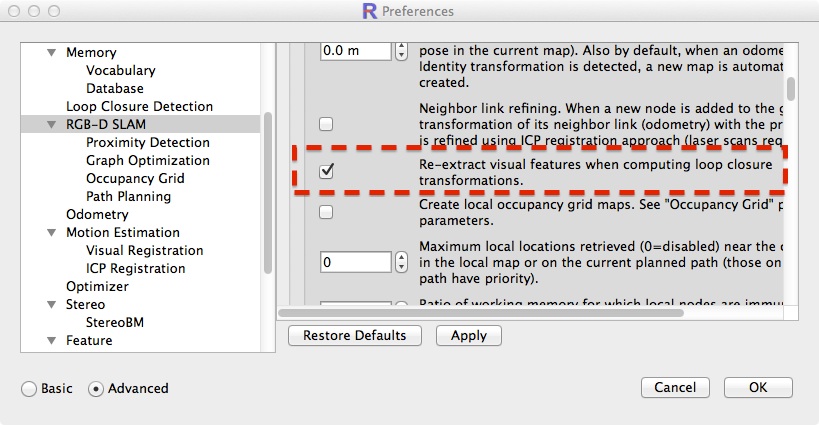
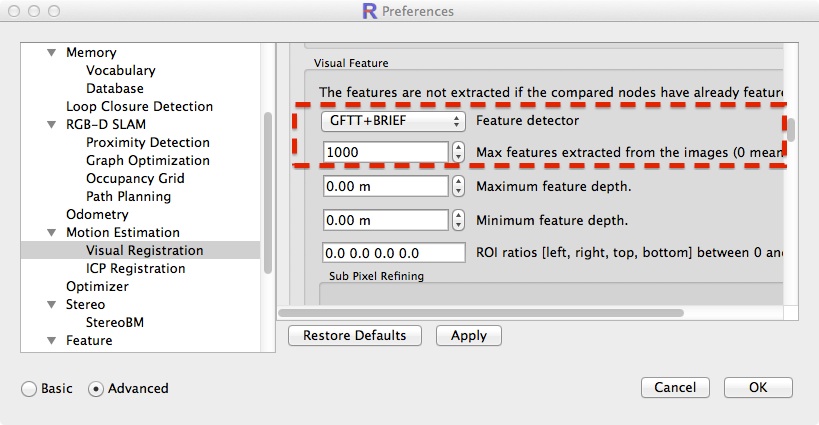
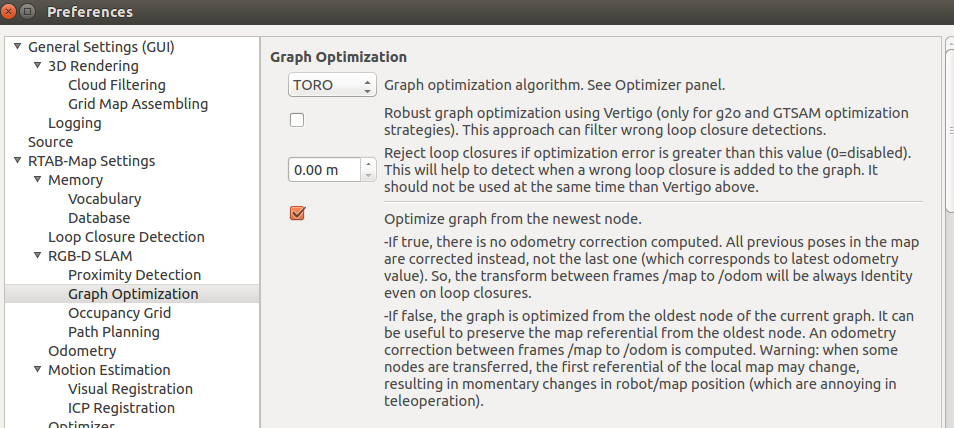
And here is my config when outputing
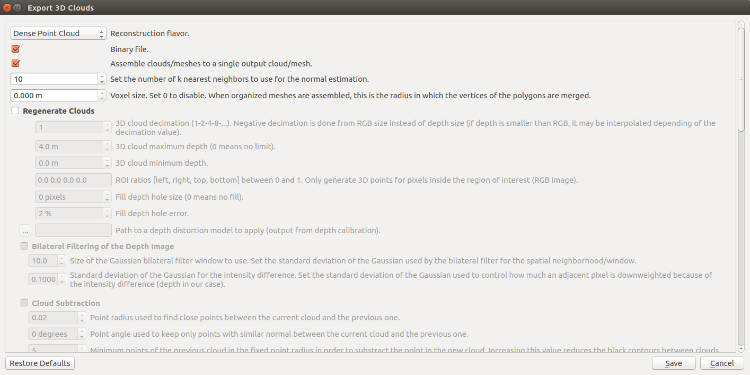
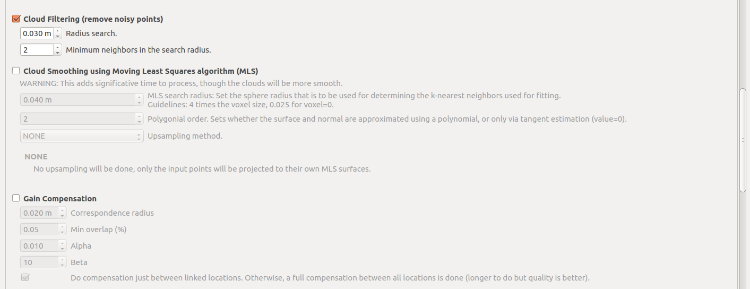
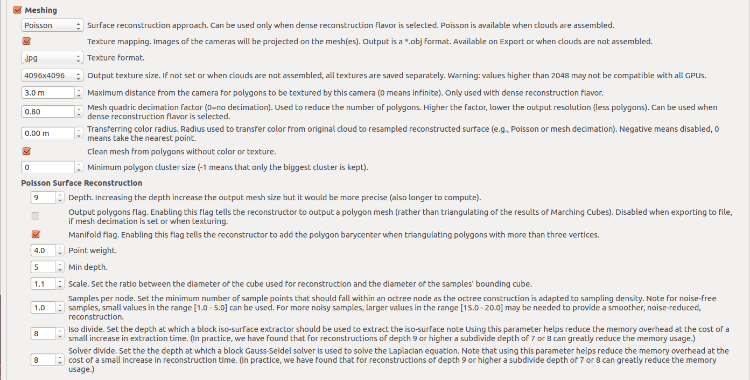
With this configuration and when I check the option "Gain Compensation", an error occurred
[pcl::KdTreeFLANN::setInputCloud] Cannot create a KDTree with an empty input cloud!
[pcl::KdTreeFLANN::setInputCloud] Cannot create a KDTree with an empty input cloud!
[pcl::KdTreeFLANN::setInputCloud] Cannot create a KDTree with an empty input cloud!
Failed to find match for field 'normal_x'.
Failed to find match for field 'normal_y'.
Failed to find match for field 'normal_z'.
Failed to find match for field 'curvature'.
rtabmap: /build/pcl-6_P28C/pcl-1.7.2/kdtree/include/pcl/kdtree/impl/kdtree_flann.hpp:172: int pcl::KdTreeFLANN<PointT, Dist>::radiusSearch(const PointT&, double, std::vector<int>&, std::vector<float>&, unsigned int) const [with PointT = pcl::PointXYZRGBNormal; Dist = flann::L2_Simple<float>]: Assertion `point_representation_->isValid (point) && "Invalid (NaN, Inf) point coordinates given to radiusSearch!"' failed.
Aborted (core dumped)