Hey,
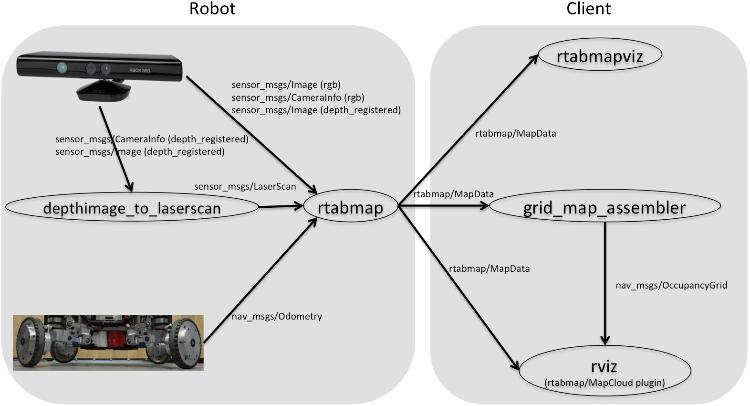
I've been trying to replicate the setup of the winners of the iros 2014 challenge but I'm kind of a beginner with ROS. I'm also using an asus xtion pro instead of a kinect and an iRobot Create 2 as the base. I've modified the launch files to account for this (I think) but I don't think I fully understand what my tf tree should look like. I've gone through the ROS tf tutorials but I'm still kind of lost. Right now it is just the tree generated by the asus camera with camera_link as the parent. I've also tried launching a node for the world to map tf broadcaster but it doesn't seem to do anything. Any guidance on how I should proceed?
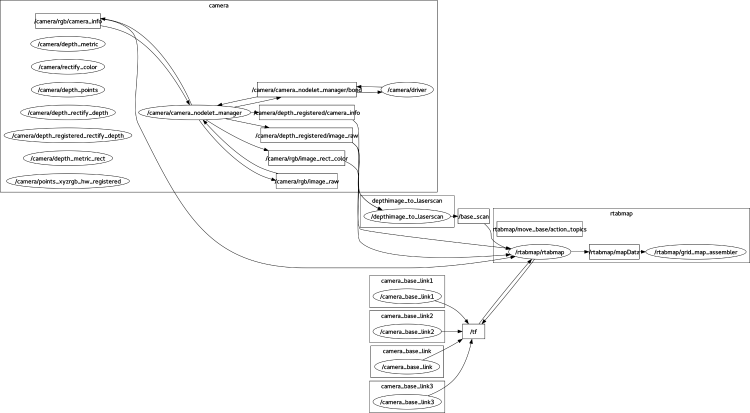
Here is the rqt visualization after running the launch file:
And here is the code from the actual launch file itself:
<launch>
<node pkg="depthimage_to_laserscan" type="depthimage_to_laserscan" name="depthimage_to_laserscan">
<remap from="image" to="/camera/depth_registered/image_raw"/>
<remap from="camera_info" to="/camera/depth_registered/camera_info"/>
<remap from="scan" to="/base_scan"/>
</node>
<group ns="rtabmap">
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="--delete_db_on_start">
(param name="subscribe_depth" type="bool" value="true"/)
(param name="subscribe_laserScan" type="bool" value="true"/)
<remap from="odom" to="/base_controller/odom"/>
<remap from="scan" to="/base_scan"/>
<remap from="rgb/image" to="/camera/rgb/image_rect_color"/>
<remap from="depth/image" to="/camera/depth_registered/image_raw"/>
<remap from="rgb/camera_info" to="/camera/rgb/camera_info"/>
(param name="queue_size" type="int" value="10"/)
(!-- RTAB-Map's parameters --)
(...)
</node>
<node pkg="rtabmap_ros" type="grid_map_assembler" name="grid_map_assembler"/>
</group>
<node pkg="rviz" type="rviz" name="rviz"/>
</launch>
Any help would be greatly appreciated.
Thanks