Auto navigation example


|
This post was updated on .
Currently I could build up 2D and 3D map by the following command:
However, when I click the "2D Nav Goal" nothing happend(no planning path appear). Did I missed something? (My final goal is to use Kinectv2+turtlebot2 to do auto navigation. Right now I can only do SLAM.) |
|
Administrator
|
Hi,
move_base is not started. As you are using a turtlebot, look at this tutorial (you may have to change turtlebot configuration files to use kinectv2 instead of default kinect or XTION): http://wiki.ros.org/rtabmap_ros/Tutorials/MappingAndNavigationOnTurtlebot You may also want to try official turtlebot tutorials before trying with rtabmap: http://wiki.ros.org/turtlebot_navigation/Tutorials/indigo/Build%20a%20map%20with%20SLAM cheers, Mathieu |
|
|
This post was updated on .
matlabbe Thanks for your reply.
After I started the move_base node by the launch file in turtlebot_navigation, and the kobuki node nothing change.
/opt/ros/kinetic/share/turtlebot_navigation/launch/includes/move_base.launch.xml
|
|
Administrator
|
Hi,
I am not aware on how exactly all turtlebot launch files are configured, but you would have to remap the /rtabmap/grid_map topic to /map to be connected to move_base (see top schema on this tutorial). The frame_id is not the same between rtabmap and move_base (it should be base_footprint). You should not start rgbd_mapping.launch twice. Here is a combined example:
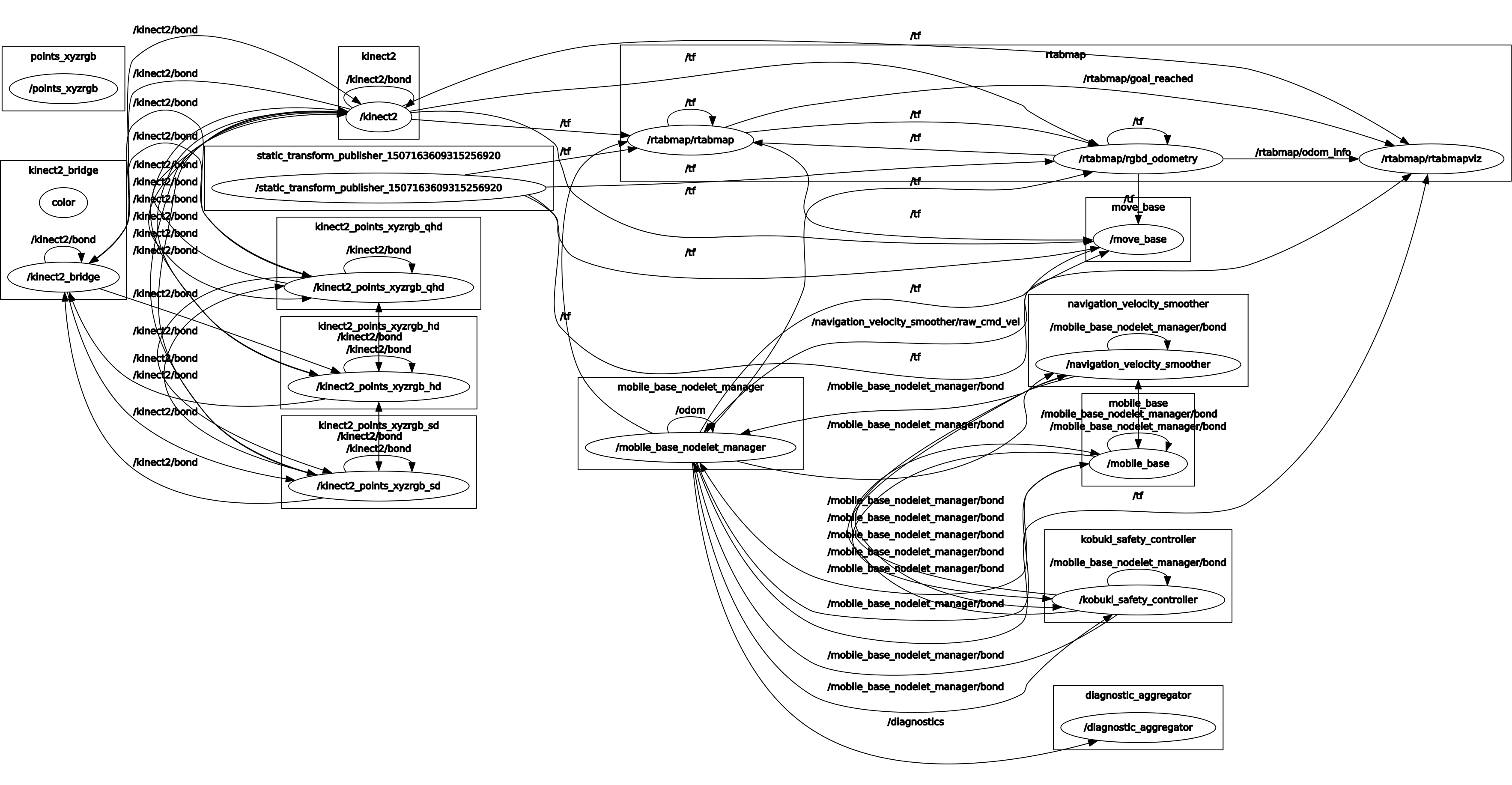
roslaunch kinect2_bridge kinect2_bridge.launch publish_tf:=true # Adjust height of the camera rosrun tf static_transform_publisher 0 0 0 -1.5707963267948966 0 -1.5707963267948966 base_footprint kinect2_link 100 roslaunch rtabmap_ros rgbd_mapping.launch rtabmap_args:="--delete_db_on_start" frame_id:=base_footprint rgb_topic:=/kinect2/qhd/image_color_rect depth_registered_topic:=/kinect2/qhd/image_depth_rect camera_info_topic:=/kinect2/qhd/camera_info rviz:=true rtabmapviz:=false roslaunch turtlebot_navigation move_base.launch roslaunch kobuki_node minimal.launch <launch> <include file="$(find turtlebot_navigation)/launch/includes/velocity_smoother.launch.xml"/> <include file="$(find turtlebot_navigation)/launch/includes/safety_controller.launch.xml"/> <arg name="odom_frame_id" default="odom"/> <arg name="base_frame_id" default="base_footprint"/> <arg name="global_frame_id" default="map"/> <arg name="odom_topic" default="odom" /> <arg name="laser_topic" default="scan" /> <arg name="custom_param_file" default="$(find turtlebot_navigation)/param/dummy.yaml"/> <!-- remap /map to /rtabmap/map --> <remap from="map" to="/rtabmap/grid_map"/> <node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen"> <rosparam file="$(find turtlebot_navigation)/param/costmap_common_params.yaml" command="load" ns="global_costmap" /> <rosparam file="$(find turtlebot_navigation)/param/costmap_common_params.yaml" command="load" ns="local_costmap" /> <rosparam file="$(find turtlebot_navigation)/param/local_costmap_params.yaml" command="load" /> <rosparam file="$(find turtlebot_navigation)/param/global_costmap_params.yaml" command="load" /> <rosparam file="$(find turtlebot_navigation)/param/dwa_local_planner_params.yaml" command="load" /> <rosparam file="$(find turtlebot_navigation)/param/move_base_params.yaml" command="load" /> <rosparam file="$(find turtlebot_navigation)/param/global_planner_params.yaml" command="load" /> <rosparam file="$(find turtlebot_navigation)/param/navfn_global_planner_params.yaml" command="load" /> <!-- external params file that could be loaded into the move_base namespace --> <rosparam file="$(arg custom_param_file)" command="load" /> <!-- reset frame_id parameters using user input data --> <param name="global_costmap/global_frame" value="$(arg global_frame_id)"/> <param name="global_costmap/robot_base_frame" value="$(arg base_frame_id)"/> <param name="local_costmap/global_frame" value="$(arg odom_frame_id)"/> <param name="local_costmap/robot_base_frame" value="$(arg base_frame_id)"/> <param name="DWAPlannerROS/global_frame_id" value="$(arg odom_frame_id)"/> <remap from="cmd_vel" to="navigation_velocity_smoother/raw_cmd_vel"/> <remap from="odom" to="$(arg odom_topic)"/> <remap from="scan" to="$(arg laser_topic)"/> </node> </launch> It is strange that kinect2 topics are not connected to rtabmap in your graph and that rgbd_odometry is missing, make sure you are able to map before trying integrate move_base. Is this basic tutorial working? http://wiki.ros.org/rtabmap_ros/Tutorials/HandHeldMapping cheers,Mathieu |
«
Return to Official RTAB-Map Forum
|
1 view|%1 views
| Free forum by Nabble | Edit this page |