Autonomous Navigation using RTAB-Map's RGBD Odometry


|
Hi Mr Mathieu,
Is it possible to do autonomous navigation using RTAB-Map's RGBD Odometry as the only odometry source? I've tried to do this using the following commands: Mapping roscore rosrun serial serial rosrun rosserial_python serial_node.py /dev/ttyUSB0 _baud:=230400 roslaunch kinect2_bridge kinect2_bridge.launch publish_tf:=true roslaunch rtabmap_ros rgbd_mapping_kinect2.launch resolution:=qhd rtabmap_args:="--delete_db_on_start" rviz:=true rtabmapviz:=false rosrun teleop_twist_keyboard teleop_twist_keyboard.py Navigation rosrun depthimage_to_laserscan depthimage_to_laserscan image:=/kinect2/qhd/image_depth_rect camera_info:=/camera/camera_info My robot doesn't have nav_msgs/Odometry and tf, then I'm trying to use the /rtabmap/odom topic: publish_odom.cpp #include <ros/ros.h> #include <tf/transform_broadcaster.h> #include <nav_msgs/Odometry.h> #include "geometry_msgs/Pose2D.h" #include "geometry_msgs/Twist.h" #include "std_msgs/Char.h" #include "std_msgs/UInt16.h" #include "angles/angles.h" #include "iostream" ros::Publisher pub_velocity; ros::Timer tim_50hz; //odometry & gyro double pos_x,pos_y; double theta; double buffer_pos_x, buffer_pos_y, buffer_theta; double offset_pos_x = 0, offset_pos_y = 0, offset_theta = 0; double linearposx = 0, linearposy = 0, quatx = 0, quaty = 0, quatz = 0, quatw = 0, vex = 0, vey = 0, vez = 0; //velocity double vx = 0,vy = 0,vw = 0; double buffer_vx = 0, buffer_vy = 0, buffer_vw = 0; double buffer_vx_new = 0, buffer_vy_new = 0, buffer_vw_new = 0; void manual_move(int _vx, int _vy, int _vw) { geometry_msgs::Twist msg_velocity; msg_velocity.linear.x = vx = _vx; msg_velocity.linear.y = vy = _vy; msg_velocity.angular.z = vw = _vw; pub_velocity.publish(msg_velocity); } void callback_velocity (const geometry_msgs::TwistPtr &msg) { buffer_vx_new = msg->linear.x; buffer_vx = buffer_vx_new *40; buffer_vy_new = msg->linear.y; buffer_vy = buffer_vy_new *40; buffer_vw_new = msg->angular.z; buffer_vw = buffer_vw_new *40; } void callback_odometry (const nav_msgs::Odometry::ConstPtr &msg) { linearposx=msg->pose.pose.position.x; linearposy=msg->pose.pose.position.y; quatx=msg->pose.pose.orientation.x; quaty=msg->pose.pose.orientation.y; quatz=msg->pose.pose.orientation.z; quatw=msg->pose.pose.orientation.w; vex=msg->twist.twist.linear.x; vey=msg->twist.twist.linear.y; vez=msg->twist.twist.angular.z; } void callback_50hz(const ros::TimerEvent &time) { manual_move(buffer_vx,buffer_vy,buffer_vw); ROS_INFO("%f", theta); } int main(int argc, char** argv){ ros::init(argc, argv, "odometry_publisher"); ros::NodeHandle n; ros::Publisher odom_pub = n.advertise<nav_msgs::Odometry>("odom", 50); pub_velocity = n.advertise<geometry_msgs::Twist>("pc2stm_velocity",8); tf::TransformBroadcaster odom_broadcaster; ros::Subscriber sub_odometry = n.subscribe("/rtabmap/odom", 50,callback_odometry); ros::Subscriber sub_velocity = n.subscribe("cmd_vel", 8, callback_velocity); tim_50hz = n.createTimer(ros::Duration(0.02), callback_50hz); ros::Time current_time, last_time; current_time = ros::Time::now(); last_time = ros::Time::now(); ros::Rate r(50); while(n.ok()){ ros::spinOnce(); // check for incoming messages current_time = ros::Time::now(); //first, we'll publish the transform over tf geometry_msgs::TransformStamped odom_trans; odom_trans.header.stamp = current_time; odom_trans.header.frame_id = "odom"; odom_trans.child_frame_id = "base_link"; odom_trans.transform.translation.x = linearposx; odom_trans.transform.translation.y = linearposy; odom_trans.transform.translation.z = 0.0; odom_trans.transform.rotation.x = quatx; odom_trans.transform.rotation.y = quaty; odom_trans.transform.rotation.z = quatz; odom_trans.transform.rotation.w = quatw; //send the transform odom_broadcaster.sendTransform(odom_trans); //next, we'll publish the odometry message over ROS nav_msgs::Odometry odom; odom.header.stamp = current_time; odom.header.frame_id = "odom"; //set the position odom.pose.pose.position.x = linearposx; odom.pose.pose.position.y = linearposy; odom.pose.pose.position.z = 0.0; odom.pose.pose.orientation.x = quatx; odom.pose.pose.orientation.y = quaty; odom.pose.pose.orientation.z = quatz; odom.pose.pose.orientation.w = quatw; //set the velocity odom.child_frame_id = "base_link"; odom.twist.twist.linear.x = vex; odom.twist.twist.linear.y = vey; odom.twist.twist.angular.z = vez; //publish the message odom_pub.publish(odom); last_time = current_time; r.sleep(); } } tf_broadcaster.cpp #include <ros/ros.h> #include <tf/transform_broadcaster.h> int main(int argc, char** argv){ ros::init(argc, argv, "mobile_robot_tf_publisher"); ros::NodeHandle nh; ros::Rate r(100); tf::TransformBroadcaster base_to_laser_broadcaster; while(nh.ok()){ /*base_to_laser_broadcaster.sendTransform( tf::StampedTransform( tf::Transform(tf::Quaternion(0, 0, 0, 1), tf::Vector3(0, 0, 0)), ros::Time::now(),"map", "odom"));*/ base_to_laser_broadcaster.sendTransform( tf::StampedTransform( tf::Transform(tf::Quaternion(0, 0, 0, 1), tf::Vector3(0, 0, 0)), ros::Time::now(),"odom", "base_link")); base_to_laser_broadcaster.sendTransform( tf::StampedTransform( tf::Transform(tf::Quaternion(0, 0, 0, 1), tf::Vector3(0.07, 0.0, 0.64)), ros::Time::now(),"base_link", "base_laser")); base_to_laser_broadcaster.sendTransform( tf::StampedTransform( tf::Transform(tf::Quaternion(0, 0, 0, 1), tf::Vector3(0, 0, 0)), ros::Time::now(),"base_laser", "camera_link")); base_to_laser_broadcaster.sendTransform( tf::StampedTransform( tf::Transform(tf::Quaternion(0, 0, 0, 1), tf::Vector3(0, 0, 0)), ros::Time::now(),"camera_link", "kinect2_base_link")); r.sleep(); } } move_base.launch (using default parameters in http://wiki.ros.org/navigation/Tutorials/RobotSetup except robot_footprint) <?xml version="1.0"?> <launch> <master auto="start"/> <arg name="map_topic" default="/rtabmap/grid_map"/> <remap from="map" to="$(arg map_topic)"/> <!-- Run the map server <node name="map_server" pkg="map_server" type="map_server" args="$(find mobile_robot_2dnav)/maps/map.yaml"/> --> <node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen"> <rosparam file="$(find mobile_robot_2dnav)/param/costmap_common_params.yaml" command="load" ns="global_costmap" /> <rosparam file="$(find mobile_robot_2dnav)/param/costmap_common_params.yaml" command="load" ns="local_costmap" /> <rosparam file="$(find mobile_robot_2dnav)/param/local_costmap_params.yaml" command="load" /> <rosparam file="$(find mobile_robot_2dnav)/param/global_costmap_params.yaml" command="load" /> <rosparam file="$(find mobile_robot_2dnav)/param/base_local_planner_params.yaml" command="load" /> </node> </launch> When I do the mapping process the robot's tf moved according to the robot, but when I run the publish_odom.cpp the robot's tf is not moving correctly, and there are errors relating to the odom's quaternion. I can't set the 2D Pose Estimate in rviz too and when I send the 2D Nav Goal the robot will travel some distance and then keep rotating in place. So I think the odom is not published correctly or the subscribed topic is wrong? How can I publish RTAB-Map's RGBD Odometry correctly? Thank You |
|
Administrator
|
Hi,
For your question yes. See for example the 5. If you don't have the robot section here :http://wiki.ros.org/rtabmap_ros/Tutorials/MappingAndNavigationOnTurtlebot You don't need to republish /rtabmap/odom, just remap it to /odom. See http://wiki.ros.org/Remapping%20Arguments for more info about remapping. cheers, Mathieu |
|
|
Thank you very much for answering my question, should I add these parameters from demo_turtlebot_mapping.launch to rgbd_mapping_kinect2.launch
<!-- Fix odom covariance as in simulation the covariance in /odom topic is high (0.1 for linear and 0.05 for angular) --> <param unless="$(arg rgbd_odometry)" name="odom_frame_id" value="odom"/> <param unless="$(arg rgbd_odometry)" name="odom_tf_linear_variance" value="0.001"/> <param unless="$(arg rgbd_odometry)" name="odom_tf_angular_variance" value="0.001"/> |
|
|
In reply to this post by matlabbe
The robot is still spinning in place and I can't set the 2D Pose Estimate & 2D Nav Goal in rviz. Here are the errors:
rgbd_mapping_kinect2.launch [ERROR] (2019-09-09 03:26:58.794) Rtabmap.cpp:1038::process() RGB-D SLAM mode is enabled, memory is incremental but no odometry is provided. Image 8468 is ignored! [ INFO] [1567974418.794618451]: rtabmap (535): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0001s, Maps update=0.0000s pub=0.0000s (local map=253, WM=253) [ WARN] (2019-09-09 03:26:58.891) OdometryF2M.cpp:477::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=9) between -1 and 2134" move_base.launch [ INFO] [1567974190.948698510]: Using plugin "static_layer" [ INFO] [1567974190.999688619]: Requesting the map... [ INFO] [1567974191.219708710]: Resizing costmap to 269 X 282 at 0.050000 m/pix [ INFO] [1567974191.320486571]: Received a 269 X 282 map at 0.050000 m/pix [ INFO] [1567974191.341740947]: Using plugin "obstacle_layer" [ INFO] [1567974191.353381629]: Subscribed to Topics: laser_scan_sensor [ INFO] [1567974191.460013407]: Using plugin "inflation_layer" [ INFO] [1567974191.760341730]: Using plugin "obstacle_layer" [ INFO] [1567974191.772317035]: Subscribed to Topics: laser_scan_sensor [ INFO] [1567974191.839660455]: Using plugin "inflation_layer" [ INFO] [1567974192.056783403]: Created local_planner base_local_planner/TrajectoryPlannerROS [ INFO] [1567974192.117986144]: Sim period is set to 0.05 [ INFO] [1567974192.826001591]: Recovery behavior will clear layer obstacles [ INFO] [1567974323.088857831]: Resizing costmap to 269 X 284 at 0.050000 m/pix [ WARN] [1567974328.125312477]: MessageFilter [target=map base_laser ]: Dropped 100.00% of messages so far. Please turn the [ros.costmap_2d.message_notifier] rosconsole logger to DEBUG for more information. [ WARN] [1567974391.656901867]: Clearing costmap to unstuck robot (3.000000m). [ WARN] [1567974396.706657562]: Rotate recovery behavior started. [ WARN] [1567974518.091658591]: Costmap2DROS transform timeout. Current time: 1567974518.0916, global_pose stamp: 1567974517.7267, tolerance: 0.3000 [ WARN] [1567974518.113011973]: Could not get robot pose, cancelling reconfiguration [ERROR] [1567974672.891736238]: Extrapolation Error looking up robot pose: Lookup would require extrapolation into the past. Requested time 1567974517.726727406 but the earliest data is at time 1567974662.897800108, when looking up transform from frame [base_link] to frame [map] rviz rviz [ WARN] [1567974386.640982387]: MessageFilter [target=map ]: Discarding message from [/move_base] due to empty frame_id. This message will only print once. [ WARN] [1567974386.641653553]: Invalid argument passed to canTransform argument source_frame in tf2 frame_ids cannot be empty Here is the tf frames: 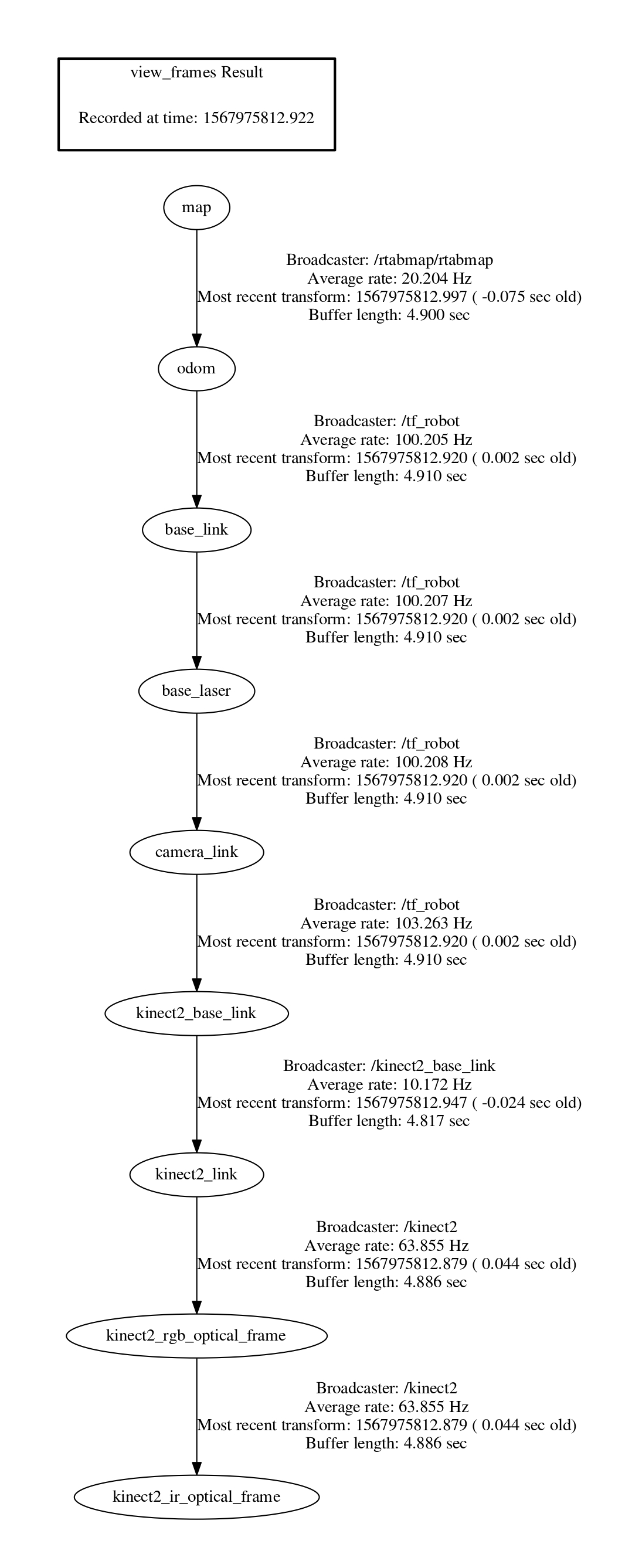
Here is the rqt graph: 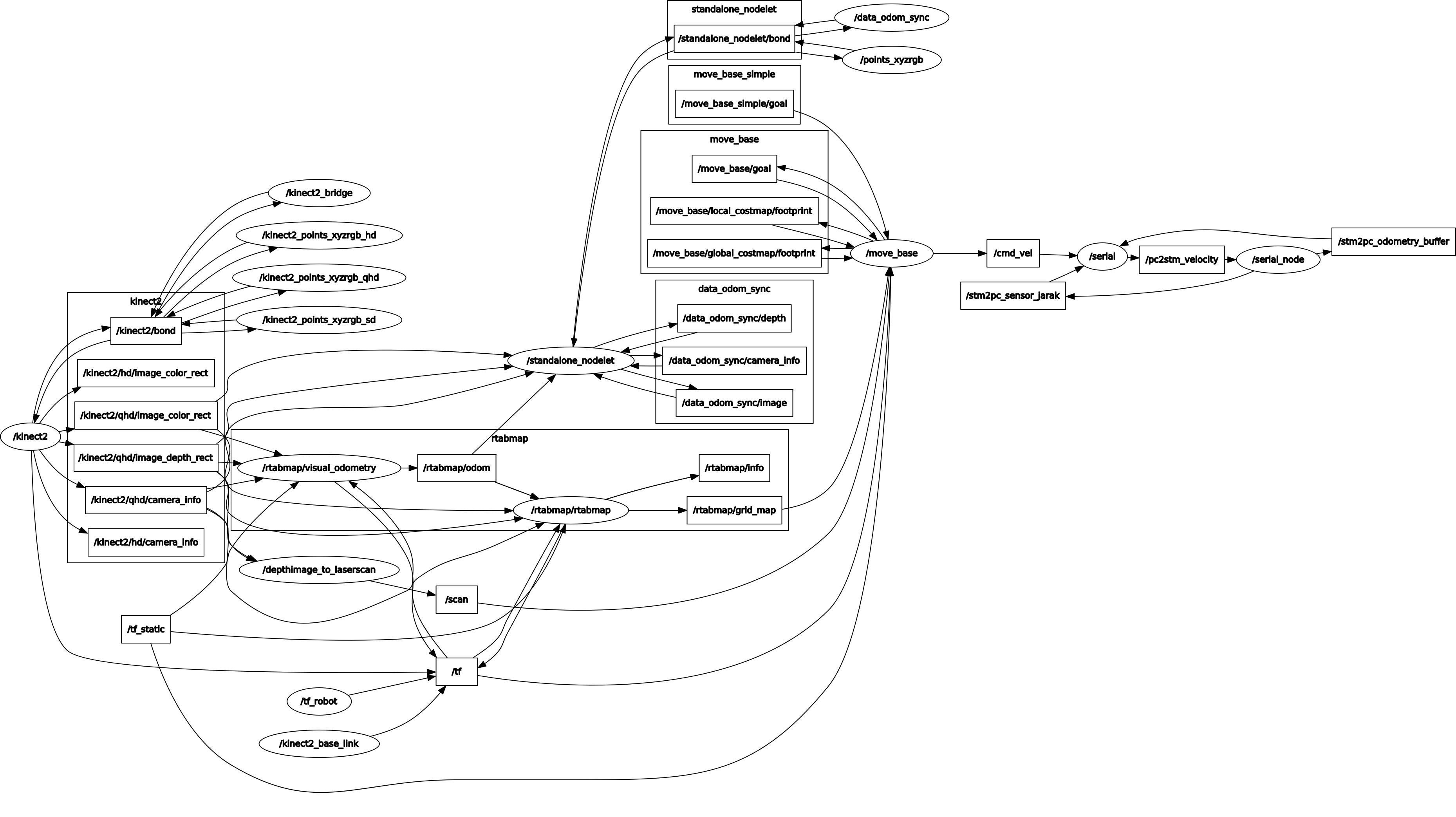
|
|
Administrator
|
Hi,
For your previous post, if you use /rtabmap/odom, you don't need to set odom_frame_id parameter. In the tf tree, odom -> base_link should not be published by tf_robot. Note also that you don't need to create a node to publish static tf, just launch multiple instances of static_transform_publisher node. I updated recently the tutorial with a turtlebot3 example. I suggest to take a look to see how navigation should work. cheers, Mathieu |
«
Return to Official RTAB-Map Forum
|
1 view|%1 views
| Free forum by Nabble | Edit this page |