Hi,
I just tried the
simulator:

Here is an example how to launch rtabmap for this:
roslaunch leo_gazebo leo_marsyard.launch
roslaunch leo_viz rviz.launch
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
roslaunch rtabmap_ros rtabmap.launch \
rgb_topic:=/zed2/left/image_rect_color \
camera_info_topic:=/zed2/left/camera_info \
depth_topic:=/zed2/depth/depth_registered \
frame_id:=base_link \
imu_topic:=/zed2/imu/data \
wait_imu_to_init:=true \
args:="-d"
I did a small loop, the loop closure was detected.
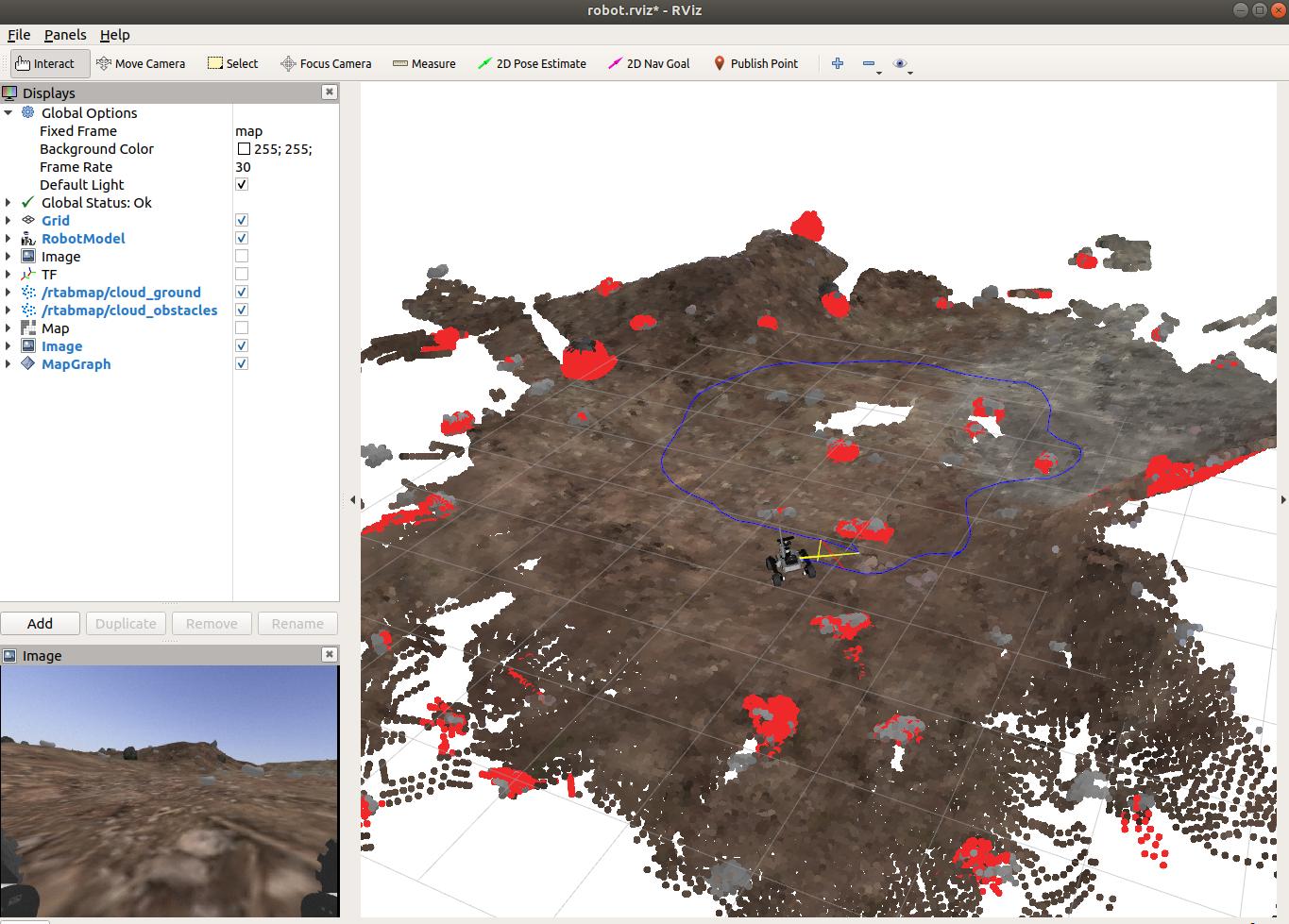
The rocks would be segmented in red. I didn't do any tuning for the segmentation, but most rocks seem detected. Here is the 2D occupancy grid map that could be used with move_base:
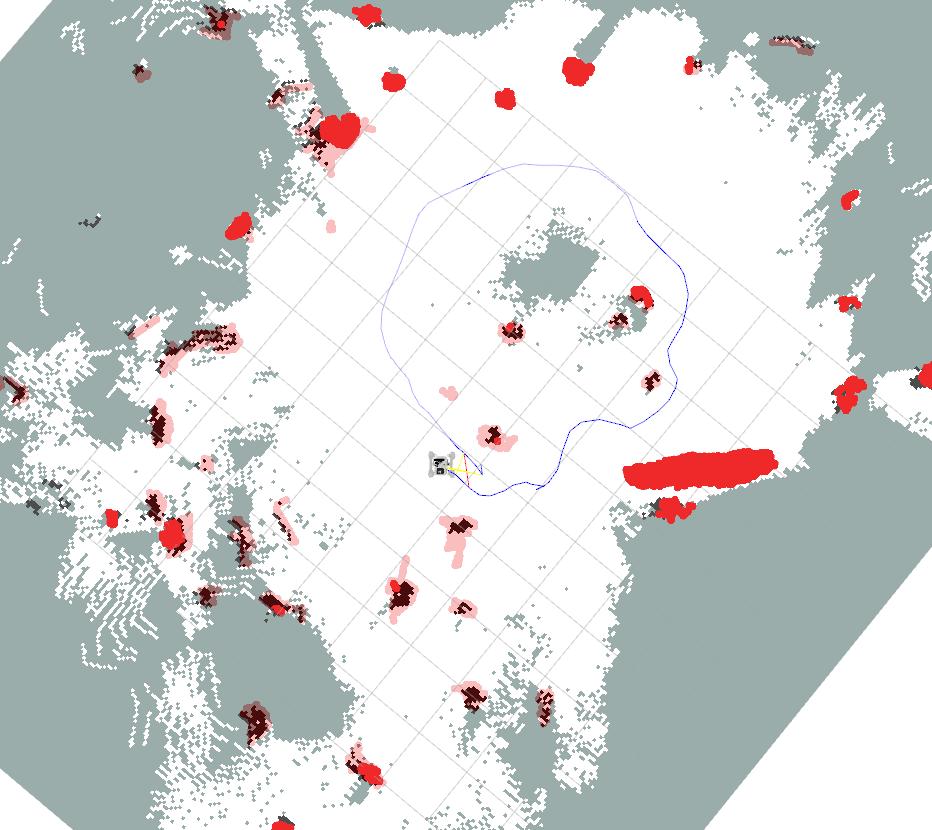
To get obstacles segmented for the local costmap, something like in
this example could be done.
cheers,
Mathieu

