Hi,
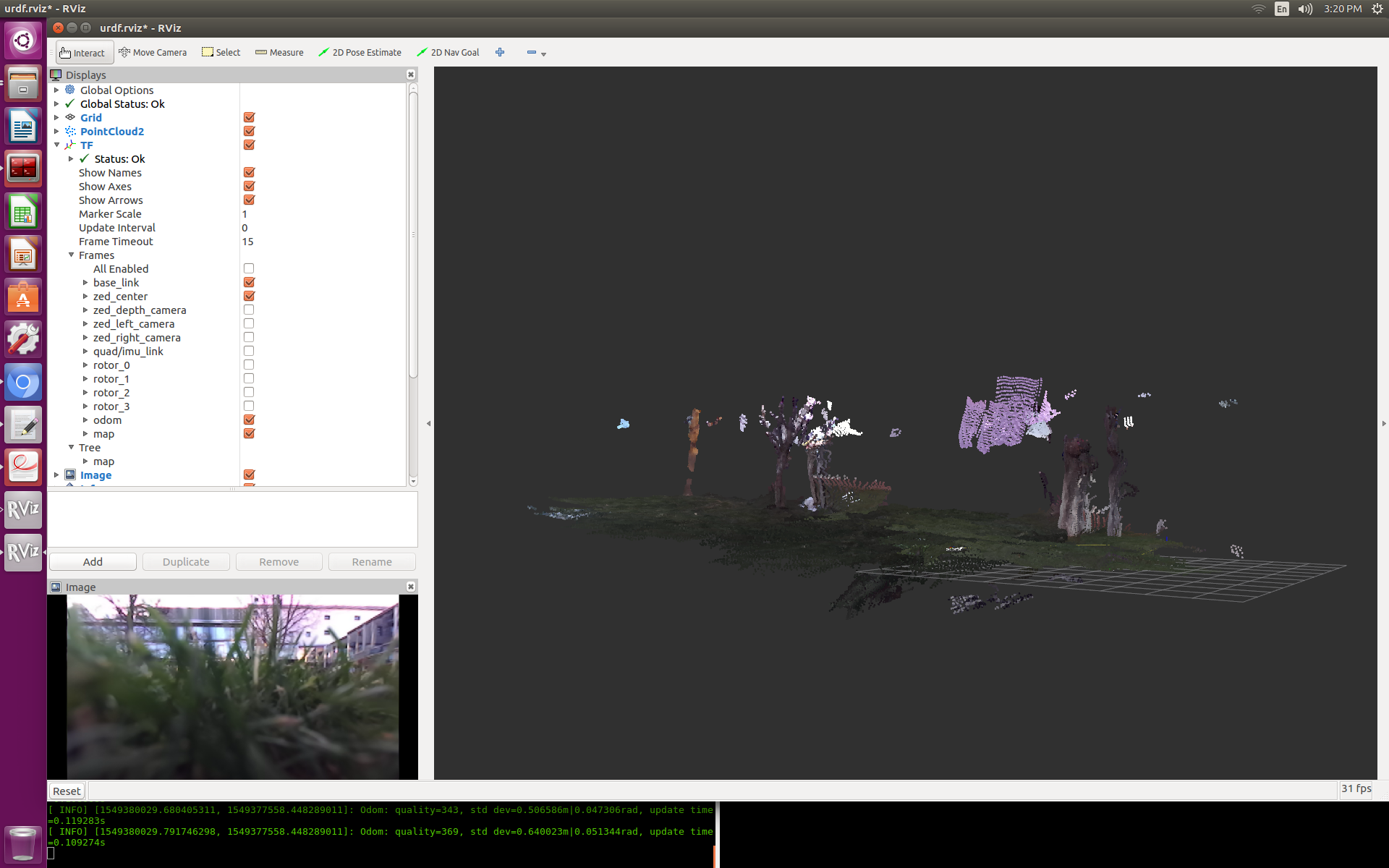
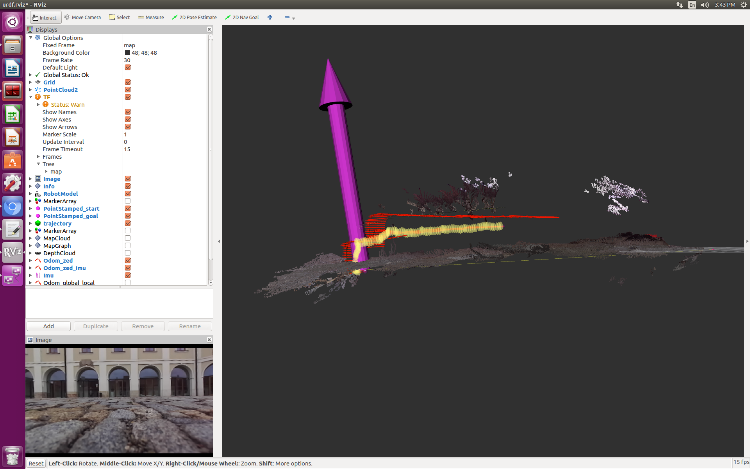
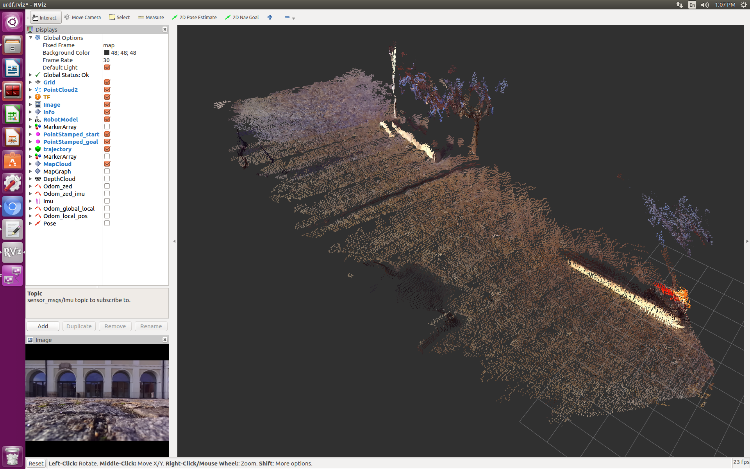
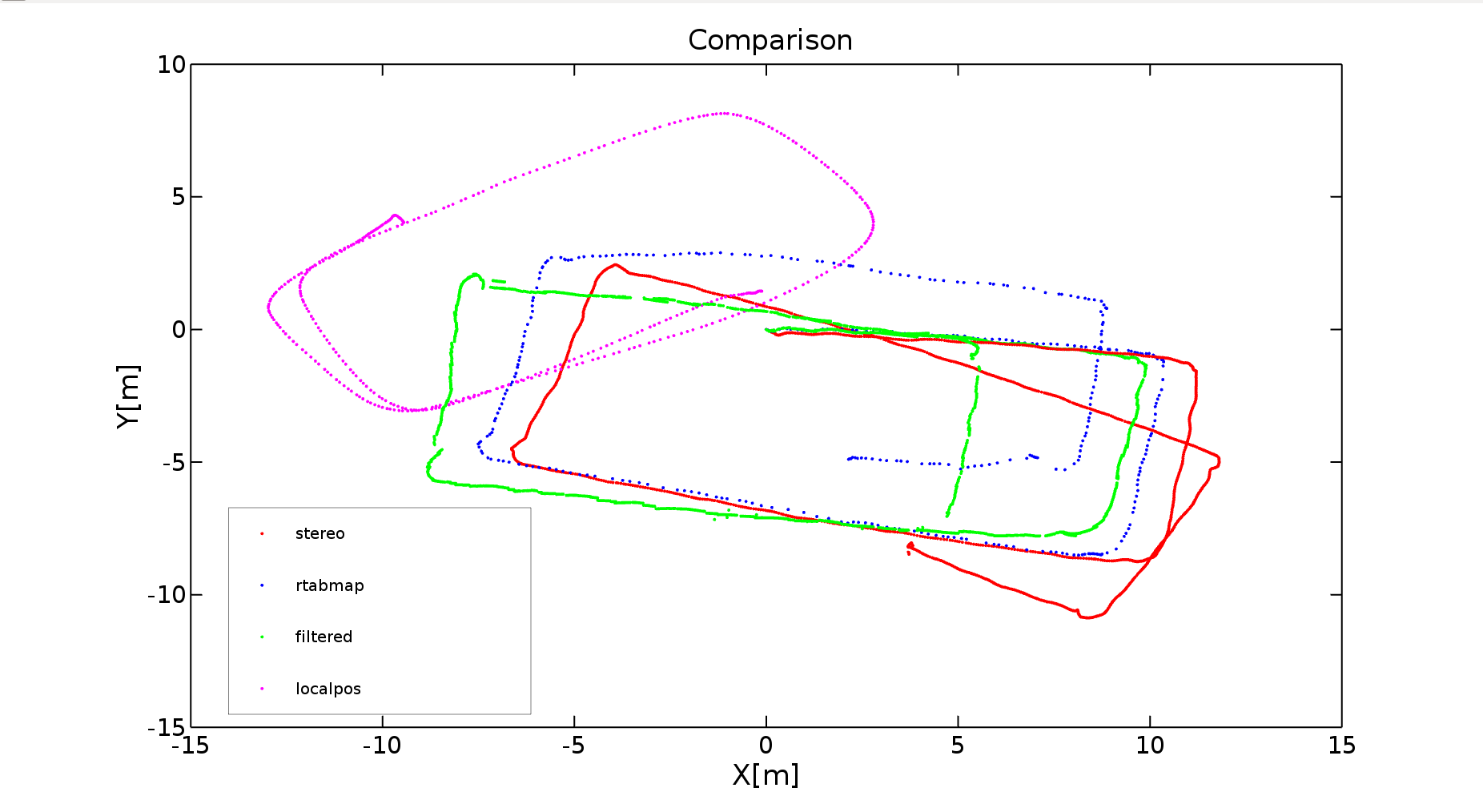
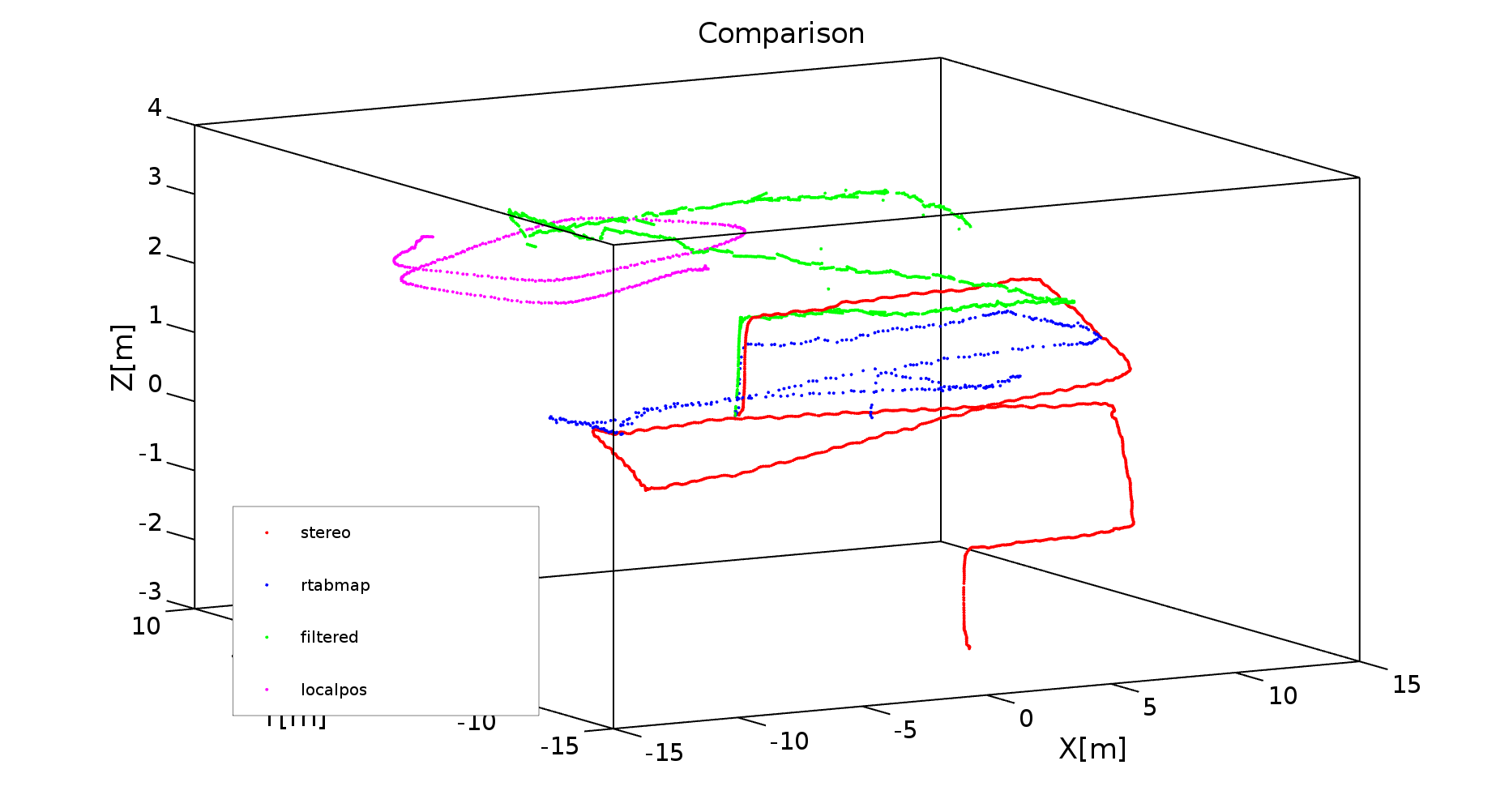
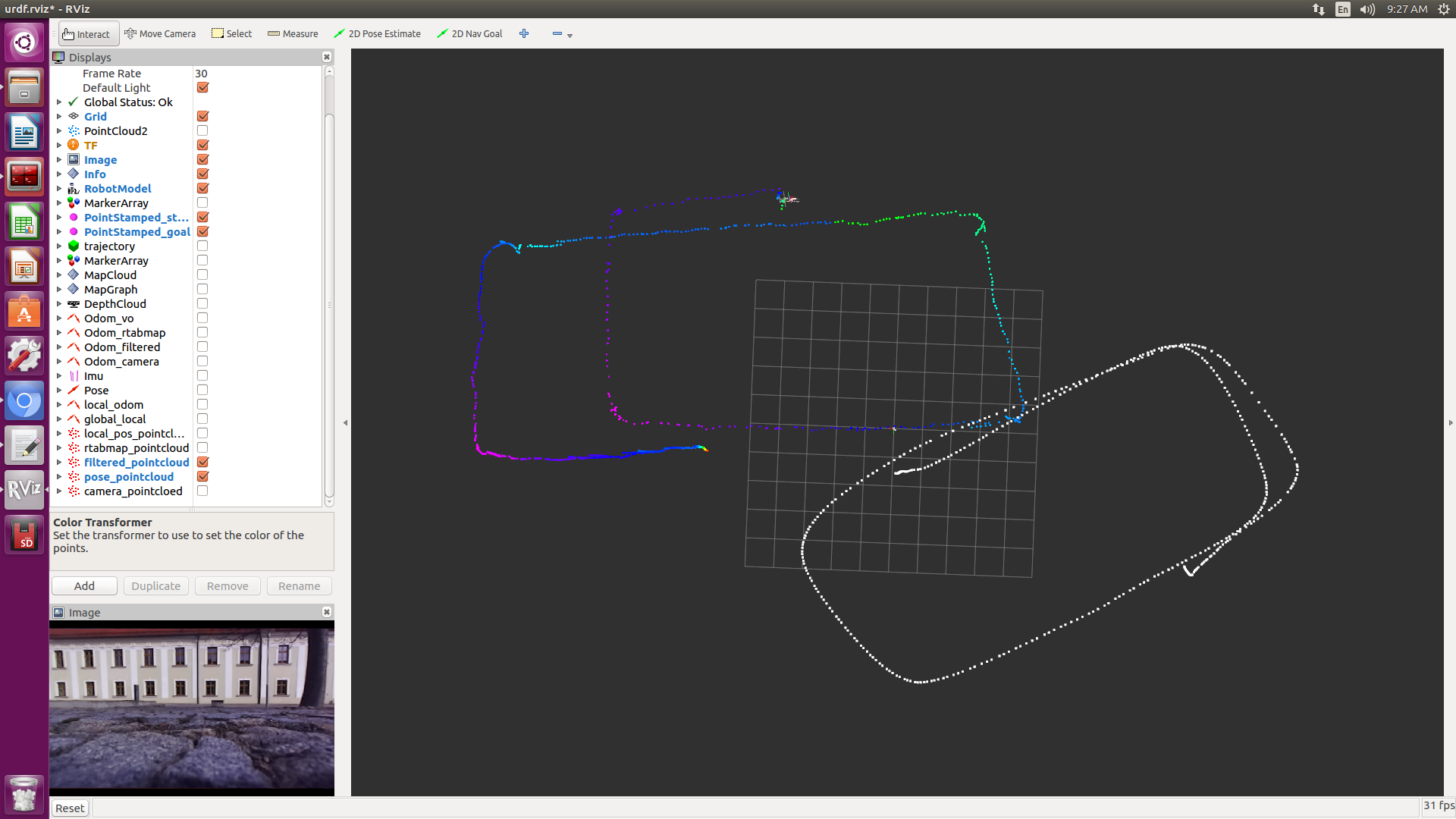
I cannot test the imu/fusion stuff as there are launch files missing. I could test the rtabmap vo part. It seems to work correctly, minor the fact there is a huge drift on take off, which makes the whole map tilting.
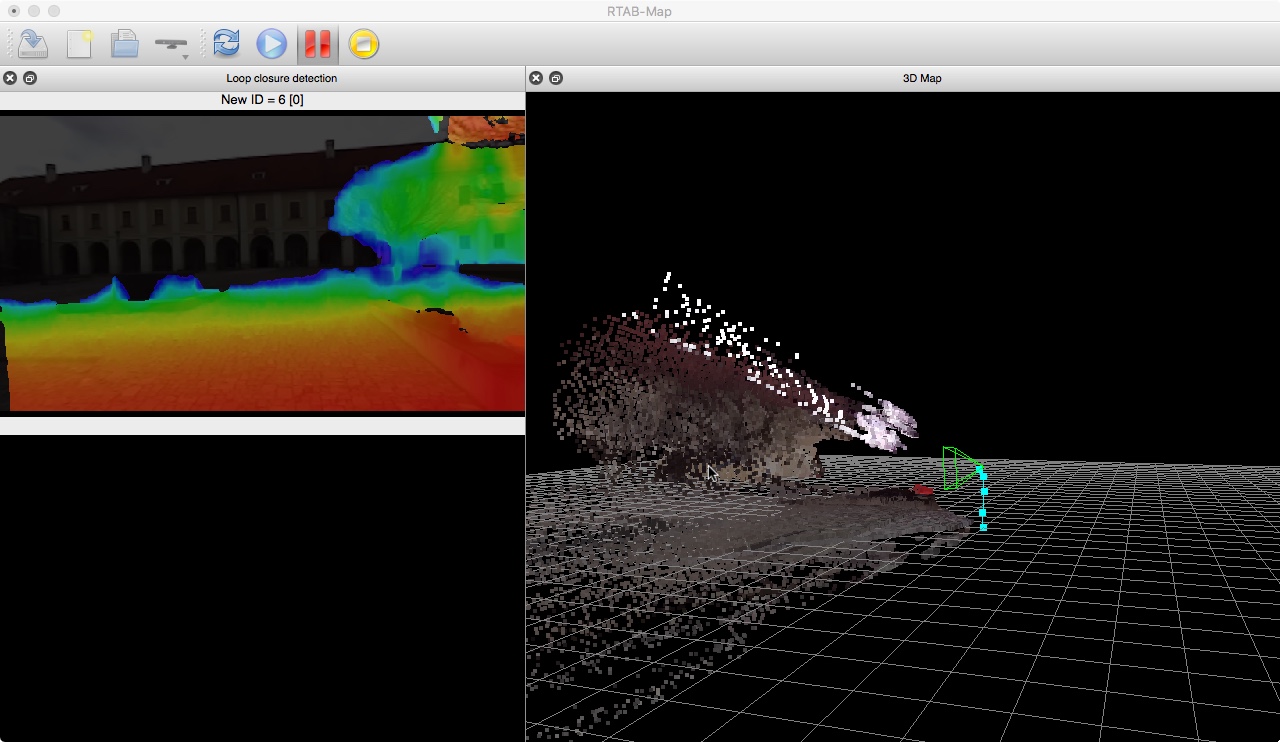
I tried the stereo mode for rtabmap, but the right camera_info of the zed seems not correct (which makes the clouds very small and vo poses very small). The Tx (baseline) is wrong (note the -0.04010362923145294):
header:
seq: 114
stamp:
secs: 1550050594
nsecs: 135220352
frame_id: "zed_left_camera"
height: 376
width: 672
distortion_model: "plumb_bob"
D: [0.0, 0.0, 0.0, 0.0, 0.0]
K: [334.4449462890625, 0.0, 350.9258728027344, 0.0, 334.4449462890625, 190.33578491210938, 0.0, 0.0, 1.0]
R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P: [334.4449462890625, 0.0, 350.9258728027344, -0.04010362923145294, 0.0, 334.4449462890625, 190.33578491210938, 0.0, 0.0, 0.0, 1.0, 0.0]
binning_x: 0
binning_y: 0
roi:
x_offset: 0
y_offset: 0
height: 0
width: 0
do_rectify: False
Here is an example with my zed:
header:
seq: 238
stamp:
secs: 1551112002
nsecs: 133999296
frame_id: "zed_right_camera_optical_frame"
height: 376
width: 672
distortion_model: "plumb_bob"
D: [0.0, 0.0, 0.0, 0.0, 0.0]
K: [331.7145690917969, 0.0, 352.4257507324219, 0.0, 331.7145690917969, 189.7296142578125, 0.0, 0.0, 1.0]
R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P: [331.7145690917969, 0.0, 352.4257507324219, -39.805747985839844, 0.0, 331.7145690917969, 189.7296142578125, 0.0, 0.0, 0.0, 1.0, 0.0]
binning_x: 0
binning_y: 0
roi:
x_offset: 0
y_offset: 0
height: 0
width: 0
do_rectify: FalseThere is maybe a TF missing to rotate the camera in ROS coordinates on stereo mode. Look at this
example:
$ export ROS_NAMESPACE=stereo_camera
$ roslaunch zed_wrapper zed_camera.launch publish_tf:=false resolution:=3
$ rosrun tf static_transform_publisher 0 0 0 -1.5707963267948966 0 -1.5707963267948966 camera_link zed_left_camera_optical_ame 100
$ roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start --Vis/CorFlowMaxLevel 5 --Stereo/MaxDisparity 200" right_image_topic:=/stereo_camera/right/image_rect_color stereo:=true
Also when using rtabmap.launch in a launch file, set parameters in rtabmap_args argument like the example above.
cheers,
Mathieu