There is something off with the two laser scans. The /scan_multi has some double wall effect already, meaning the two scans are not correctly combined together. Here an example where red is left scan and white is right scan:
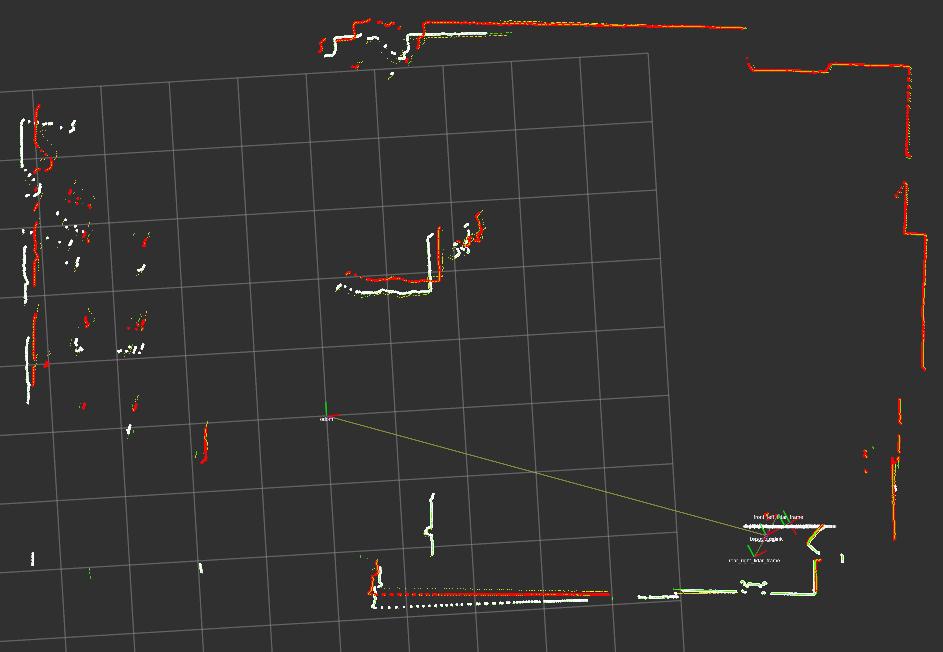
The small dots are the combined /scan_multi.
Are all your sensors synchronized on same clock? Is it wheel odometry?
I would recommend to try with a single scan instead of combining both, to see if you still have double wall effect.
Don't remember if ira laser tools package deals with motion while the lidar is rotating, to actually deskew the lidar and assemble two lidars appriopriatly. I tried with our own packages, that handle deskewing, but I still see double walls. That could mean there is a clock synchronization issue. Here what I tried:
ROS_NAMESPACE=LeftLidar rosrun rtabmap_util lidar_deskewing _fixed_frame_id:=odom input_scan:=rplidarNode/scan _wait_for_transform:=0.1
ROS_NAMESPACE=RightLidar rosrun rtabmap_util lidar_deskewing _fixed_frame_id:=odom input_scan:=rplidarNode/scan _wait_for_transform:=0.1
rosrun rtabmap_util point_cloud_aggregator cloud1:=/LeftLidar/rplidarNode/scan/deskewed cloud2:=/RightLidar/rplidarNode/scan/deskewed _fixed_frame_id:=odom
In red is your /scan_multi, in green is the output of point_cloud_aggregator, in particular when the robot is rotating it is worst.
I tried to deskew without the odometry frame, by using a constant velocity model, which can be done implicilty with icp_odometry:
rosrun rtabmap_odom icp_odometry scan:=/LeftLidar/rplidarNode/scan _deskewing:=true _frame_id:=base_footprint _publish_tf:=false
The output topic of the original scan deskewed is /odom_filtered_input_scan, in purple here:
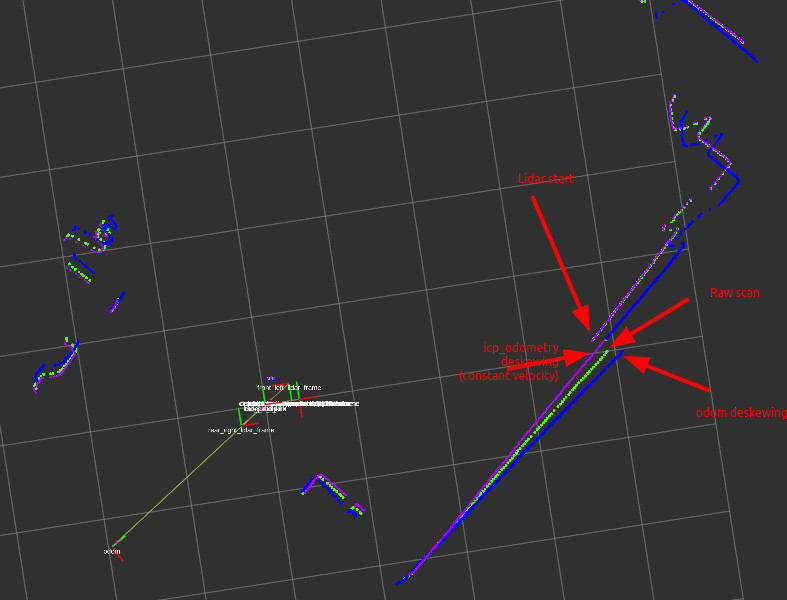
It seems using a constant velocity model is better than using odometry. I suspect your odometry is not synchronized correctly with the computer's clock, or some delay is missing, because you should normally get better deskewing with wheel odometry (with IMU even better) than a constant velocity model.
Here is a similar comparison than the gif above, using icp_odometry for deskewing: