Bad map with D435i


|
Hi,
I am working on a simulated D435i realsense camera and the result is this one: 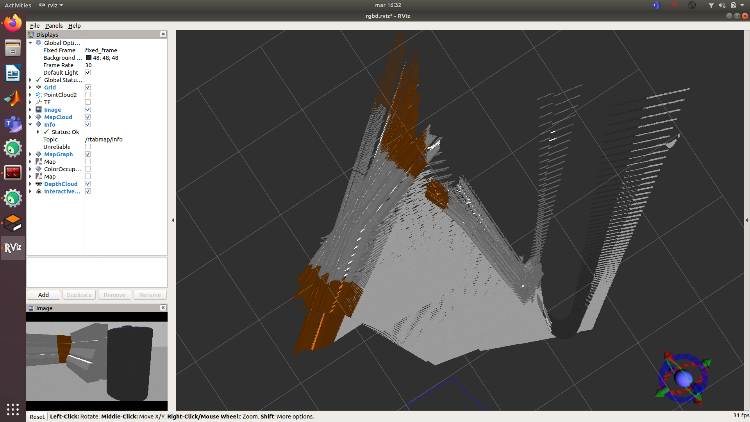 What is wrong ? My launch file is the following: <node pkg="imu_filter_madgwick" type="imu_filter_node" name="ImuFilter"> <remap from="/imu/data_raw" to="/T265/T265_camera/accel/sample"/> </node> <include file="$(find rtabmap_ros)/launch/rtabmap.launch"> <arg name="frame_id" value="pelvis"/> <arg name="args" value="--delete_db_on_start"/> <arg name="rgb_topic" value="/D435i/D435i_camera/color/image_raw"/> <arg name="depth_topic" value="/D435i/D435i_camera/depth/image_rect_raw"/> <arg name="camera_info_topic" value="/D435i/D435i_camera/color/camera_info"/> <arg name="depth_camera_info_topic" value="/D435i/D435i_camera/depth/camera_info"/> <arg name="rtabmapviz" value="false"/> <arg name="rviz" value="true"/> </include> <include file="$(find robot_localization)/launch/ukf_template.launch"/> <rosparam param="/ukf_se/odom_config">[true,true,true, true,true,true, true,true,true, true,true,true, true,true,true] </rosparam> <rosparam param="/ukf_se/imu_config">[false, false, false, true, true, true, true, true, true, true, true, true, true, true, true] </rosparam> Thank you very much for your help ! |
|
Administrator
|
Hi,
Not sure what are the inputs you are fusing in the UKF (is it wheel odometry and IMU?). As visual_odometry is not false for rtabmap.launch, visual odometry is also computed. cheers, Mathieu |
|
|
This post was updated on .
Hi,
I changed the code to this:
<node pkg="imu_filter_madgwick" type="imu_filter_node" name="ImuFilter">
<param name="use_mag" type="bool" value="false" />
<param name="_publish_tf" type="bool" value="false" />
<param name="_world_frame" type="string" value="enu" />
<remap from="/imu/data_raw" to="/T265/T265_camera/accel/sample"/>
</node>
<include file="$(find rtabmap_ros)/launch/rtabmap.launch">
<arg name="frame_id" value="pelvis"/>
<arg name="args" value="--delete_db_on_start --Grid/3D false --Grid/RayTracing true"/> <!-- delete_db_on_start -->
<arg name="rgb_topic" value="/D435i/D435i_camera/color/image_raw"/>
<arg name="depth_topic" value="/D435i/D435i_camera/depth/image_rect_raw"/>
<arg name="camera_info_topic" value="/D435i/D435i_camera/color/camera_info"/>
<arg name="depth_camera_info_topic" value="/D435i/D435i_camera/depth/camera_info"/>
<arg name="rtabmapviz" value="false"/>
<arg name="rviz" value="false"/>
<arg name="publish_tf_odom" value="false"/>
<arg name="odom_frame_id" value="fixed_frame"/> <!-- odom_frame_id on Kinetic, odom on Melodic -->
</include>
<include file="$(find robot_localization)/launch/ukf_template.launch"/>
<param name="/ukf_se/frequency" value="300"/>
<param name="/ukf_se/base_link_frame" value="pelvis"/>
<param name="/ukf_se/odom" value="rtabmap/odom"/>
<rosparam param="/ukf_se/odom_config">[true,true,true,
true,true,true,
true,true,true,
true,true,true,
true,true,true]
</rosparam>
<param name="/ukf_se/odom_relative" value="true"/>
<param name="/ukf_se/odom_pose_rejection_threshold" value="10000000"/>
<param name="/ukf_se/odom_twist_rejection_threshold" value="10000000"/>
<param name="/ukf_se/imu" value="/imu/data"/>
<rosparam param="/ukf_se/imu_config">[false, false, false,
true, true, true,
true, true, true,
true, true, true,
true, true, true]
</rosparam>
<param name="/ukf_se/imu_differential" value="true"/>
<param name="/ukf_se/imu_relative" value="false"/>
<param name="/ukf_se/use_control" value="false"/>
|
«
Return to Official RTAB-Map Forum
|
1 view|%1 views
| Free forum by Nabble | Edit this page |