Below ground(flat floor) detection


|
Hi, I've got a question about the points detected below ground(floor).
I am using realsense R200 as a RGBD camera, and using wheel encoder for odometry. As you can see from below pictures(octomap), there are points under the floor(blue~purple voxels). I am not sure whether it is normal or parameter settings are wrong. Could anyone give me a tip to get fix this problem? 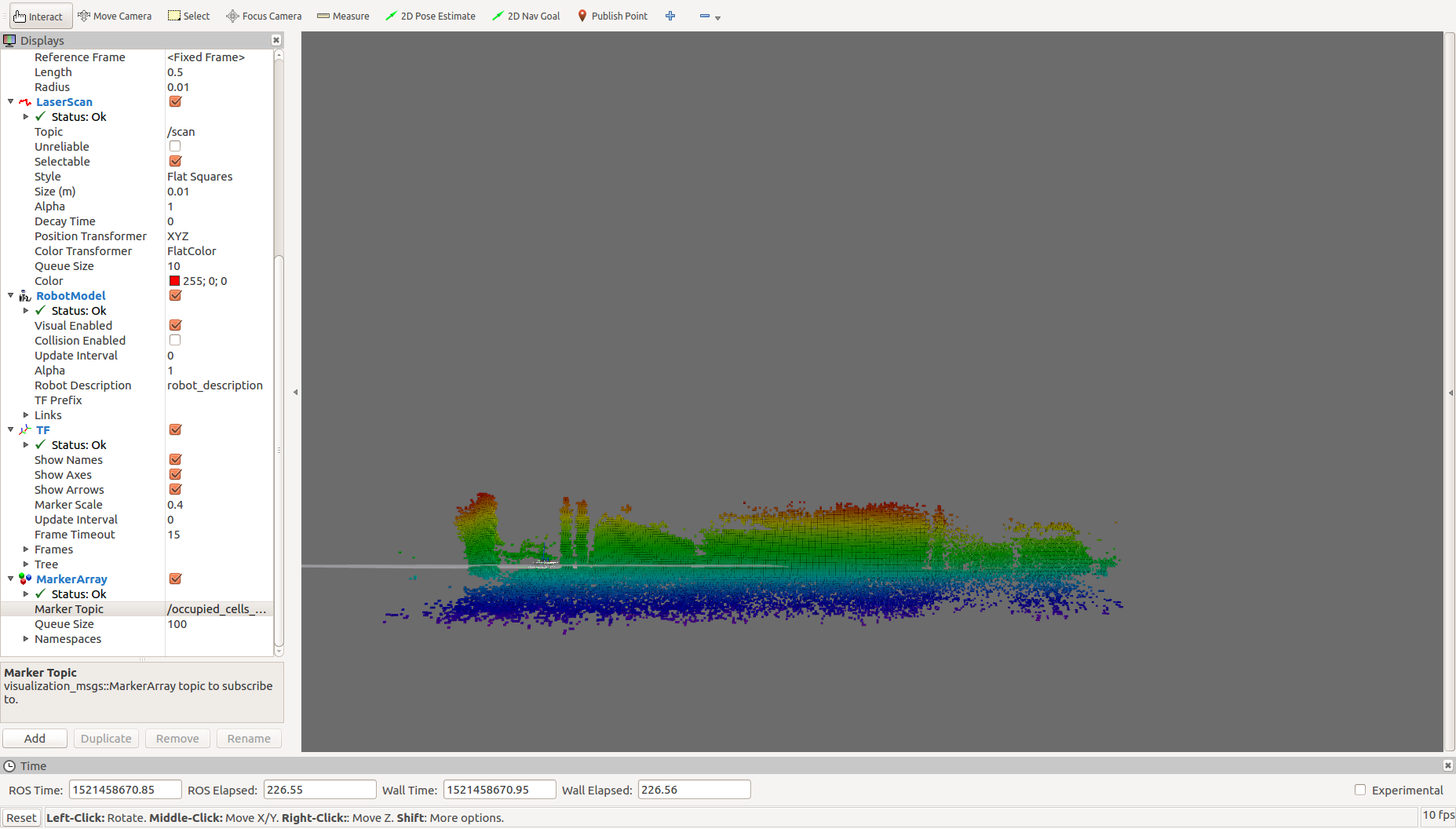 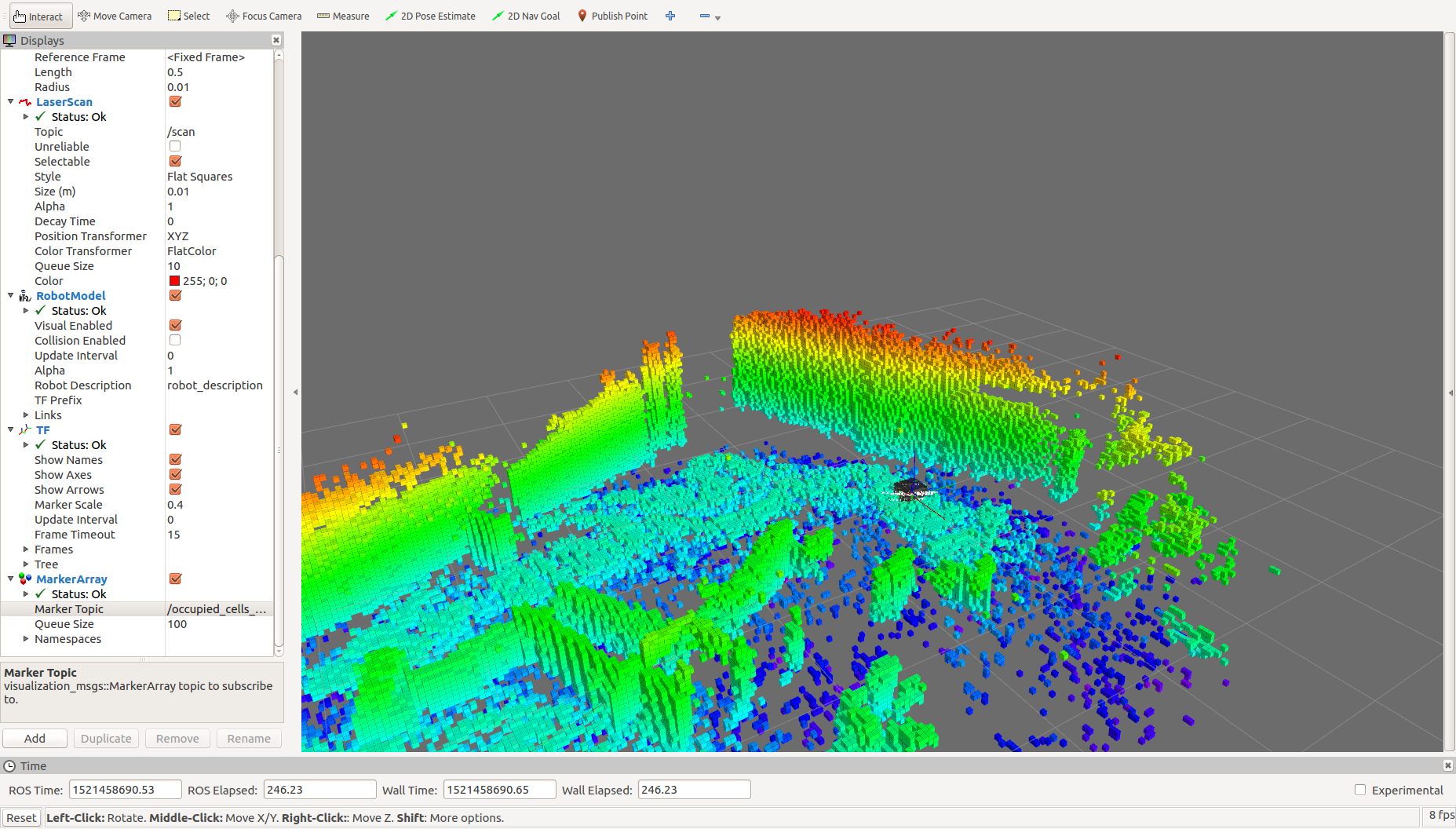 All the parameters I have in .ini file are listed below which is referred by rtabmap.launch. [CalibrationDialog] board_height = 6 board_square_size = 0.033000000000000002 board_width = 8 geometry = @ByteArray(\x1\xd9\xd0\xcb\0\x2\0\0\0\0\0\0\0\0\0\0\0\0\x5!\0\0\x3N\0\0\0\0\0\0\0\0\0\0\x5!\0\0\x3N\0\0\0\0\0\0\0\0\a\x80) max_scale = 1 [Camera] Database\cameraIndex = -1 Database\ignoreGoalDelay = true Database\ignoreGoals = true Database\ignoreOdometry = false Database\path = Database\startPos = 0 Database\useDatabaseStamps = true DepthFromScan\depthFromScan = false DepthFromScan\depthFromScanFillBorders = false DepthFromScan\depthFromScanFillHoles = true DepthFromScan\depthFromScanHorizontal = false DepthFromScan\depthFromScanVertical = true Freenect2\bilateralFiltering = true Freenect2\edgeAwareFiltering = true Freenect2\format = 0 Freenect2\maxDepth = 12 Freenect2\minDepth = 0.29999999999999999 Freenect2\noiseFiltering = true Images\bayerMode = 0 Images\filenames_as_stamps = false Images\gt_format = 0 Images\gt_path = Images\odom_format = 0 Images\odom_path = Images\path = Images\path_scans = Images\rectify = false Images\refreshDir = false Images\scan_downsample_step = 1 Images\scan_max_pts = 0 Images\scan_transform = 0 0 0 0 0 0 Images\scan_voxel_size = 0.025000000000000001 Images\stamps = Images\startPos = 0 Images\sync_stamps = true Openni\oniPath = Openni2\autoExposure = true Openni2\autoWhiteBalance = true Openni2\exposure = 0 Openni2\gain = 100 Openni2\mirroring = false Openni2\oniPath = Openni2\stampsIdsUsed = false RGBDImages\path_depth = RGBDImages\path_rgb = RGBDImages\scale = 1 RealSense\presetDepth = 2 RealSense\presetRGB = 0 ScanFromDepth\decimation = 8 ScanFromDepth\enabled = false ScanFromDepth\maxDepth = 4 ScanFromDepth\normalsK = 20 ScanFromDepth\voxelSize = 0.025000000000000001 StereoImages\path_left = StereoImages\path_right = StereoImages\rectify = false StereoVideo\path = StereoVideo\path2 = StereoVideo\rectify = false StereoZed\confidence_thr = 100 StereoZed\odom = false StereoZed\quality = 1 StereoZed\resolution = 2 StereoZed\self_calibration = false StereoZed\sensing_mode = 1 StereoZed\svo_path = Video\path = Video\rectify = false calibrationName = device = imageDecimation = 1 imgRate = 0 localTransform = 0 0 1 -1 0 0 0 -1 0 mirroring = false rgb\driver = 0 rgbd\bilateral = false rgbd\bilateral_sigma_r = 0.10000000000000001 rgbd\bilateral_sigma_s = 10 rgbd\distortion_model = rgbd\driver = 1 rgbd\rgbdColorOnly = false stereo\depthGenerated = false stereo\driver = 2 type = 0 [Gui] General\beep = false General\cloudFiltering = false General\cloudFilteringAngle = 30 General\cloudFilteringRadius = 0.10000000000000001 General\cloudNoiseMinNeighbors = 5 General\cloudNoiseRadius = 0 General\cloudVoxel = 0 General\cloudsKept = true General\decimation0 = 4 General\decimation1 = 4 General\downsamplingScan0 = 1 General\downsamplingScan1 = 1 General\figure_cache = true General\figure_time = true General\gainCompensation = false General\gridMapEroded = false General\gridMapFootprintRadius = 0 General\gridMapIncremental = false General\gridMapOpacity = 0.75 General\gridMapResolution = 0.050000000000000003 General\gridMapShown = false General\gtAlign = true General\imageHighestHypShown = false General\imageRejectedShown = true General\imagesKept = true General\loggerEventLevel = 3 General\loggerLevel = 2 General\loggerPauseLevel = 3 General\loggerPrintThreadId = false General\loggerPrintTime = true General\loggerType = 1 General\maxDepth0 = 0 General\maxDepth1 = 0 General\meshing = false General\meshing_angle = 15 General\meshing_quad = true General\meshing_texture = false General\meshing_triangle_size = 2 General\minDepth0 = 0 General\minDepth1 = 0 General\noFiltering = true General\normalKSearch = 10 General\notifyNewGlobalPath = false General\octomap = false General\octomap_2dgrid = true General\octomap_3dmap = true General\octomap_cube = true General\octomap_depth = 16 General\octomap_occupancy_thr = 0.5 General\odomDisabled = false General\odomQualityThr = 50 General\odomRegistration = 3 General\opacity0 = 1 General\opacity1 = 0.75 General\opacityScan0 = 1 General\opacityScan1 = 0.5 General\posteriorGraphView = true General\ptSize0 = 2 General\ptSize1 = 2 General\ptSizeFeatures0 = 3 General\ptSizeFeatures1 = 3 General\ptSizeScan0 = 2 General\ptSizeScan1 = 2 General\showClouds0 = true General\showClouds1 = true General\showFeatures0 = false General\showFeatures1 = true General\showGraphs = true General\showLabels = false General\showScans0 = true General\showScans1 = true General\subtractFiltering = false General\subtractFilteringAngle = 0 General\subtractFilteringMinPts = 5 General\subtractFilteringRadius = 0.02 General\verticalLayoutUsed = true General\voxelSizeScan0 = 0 General\voxelSizeScan1 = 0 [Core] Version = 0.11.13 BRIEF\Bytes = 32 BRISK\Octaves = 3 BRISK\PatternScale = 1 BRISK\Thresh = 30 Bayes\FullPredictionUpdate = false Bayes\PredictionLC = 0.1 0.36 0.30 0.16 0.062 0.0151 0.00255 0.000324 2.5e-05 1.3e-06 4.8e-08 1.2e-09 1.9e-11 2.2e-13 1.7e-15 8.5e-18 2.9e-20 6.9e-23 Bayes\VirtualPlacePriorThr = 0.9 DbSqlite3\CacheSize = 10000 DbSqlite3\InMemory = false DbSqlite3\JournalMode = 3 DbSqlite3\Synchronous = 0 DbSqlite3\TempStore = 2 FAST\Gpu = false FAST\GpuKeypointsRatio = 0.05 FAST\GridCols = 4 FAST\GridRows = 4 FAST\MaxThreshold = 200 FAST\MinThreshold = 1 FAST\NonmaxSuppression = true FAST\Threshold = 10 FREAK\NOctaves = 4 FREAK\OrientationNormalized = true FREAK\PatternScale = 22 FREAK\ScaleNormalized = true GFTT\BlockSize = 3 GFTT\K = 0.04 GFTT\MinDistance = 3 GFTT\QualityLevel = 0.001 GFTT\UseHarrisDetector = false Grid\3D = true Grid\3DGroundIsObstacle = false Grid\CellSize = 0.05 Grid\ClusterRadius = 0.1 Grid\DepthDecimation = 4 Grid\DepthMax = 10.0 Grid\DepthMin = 0.0 Grid\DepthRoiRatios = 0.0 0.0 0.0 0.0 Grid\FlatObstacleDetected = true Grid\FootprintHeight = 0.0 Grid\FootprintLength = 0.0 Grid\FootprintWidth = 0.0 Grid\FromDepth = true Grid\MapFrameProjection = false Grid\MaxGroundAngle = 45 Grid\MaxGroundHeight = 0.5 Grid\MaxObstacleHeight = 0.0 Grid\MinClusterSize = 10 Grid\MinGroundHeight = 0.1 Grid\NoiseFilteringMinNeighbors = 2 Grid\NoiseFilteringRadius = 0.05 Grid\NormalK = 10 Grid\NormalsSegmentation = true Grid\Scan2dMaxFilledRange = 4 Grid\Scan2dUnknownSpaceFilled = false Grid\ScanDecimation = 1 Icp\CorrespondenceRatio = 0.5 Icp\DownsamplingStep = 10 Icp\Epsilon = 0.01 Icp\Iterations = 10 Icp\MaxCorrespondenceDistance = 0.3 Icp\MaxRotation = 0.78 Icp\MaxTranslation = 0 Icp\PointToPlane = true Icp\PointToPlaneNormalNeighbors = 20 Icp\VoxelSize = 0.3 Kp\BadSignRatio = 0.5 Kp\DetectorStrategy = 6 Kp\DictionaryPath = Kp\IncrementalDictionary = true Kp\IncrementalFlann = true Kp\MaxDepth = 4 Kp\MaxFeatures = 400 Kp\MinDepth = 0.4 Kp\NNStrategy = 1 Kp\NewWordsComparedTogether = true Kp\NndrRatio = 0.8 Kp\Parallelized = true Kp\RoiRatios = 0.0 0.0 0.0 0.3 Kp\SubPixEps = 0.02 Kp\SubPixIterations = 0 Kp\SubPixWinSize = 3 Kp\TfIdfLikelihoodUsed = true Mem\BadSignaturesIgnored = false Mem\BinDataKept = true Mem\GenerateIds = true Mem\ImageKept = false Mem\ImagePostDecimation = 1 Mem\ImagePreDecimation = 1 Mem\IncrementalMemory = true Mem\InitWMWithAllNodes = false Mem\LaserScanDownsampleStepSize = 1 Mem\LaserScanNormalK = 0 Mem\MapLabelsAdded = true Mem\NotLinkedNodesKept = true Mem\RawDescriptorsKept = true Mem\RecentWmRatio = 0.2 Mem\ReduceGraph = false Mem\RehearsalIdUpdatedToNewOne = false Mem\RehearsalSimilarity = 0.45 Mem\RehearsalWeightIgnoredWhileMoving = false Mem\STMSize = 10 Mem\SaveDepth16Format = false Mem\TransferSortingByWeightId = false Mem\UseOdomFeatures = false ORB\EdgeThreshold = 31 ORB\FirstLevel = 0 ORB\Gpu = false ORB\NLevels = 8 ORB\PatchSize = 31 ORB\ScaleFactor = 1.2 ORB\ScoreType = 0 ORB\WTA_K = 2 Odom\AlignWithGround = false Odom\FillInfoData = true Odom\FilteringStrategy = 0 Odom\GuessMotion = false Odom\Holonomic = true Odom\ImageBufferSize = 1 Odom\ImageDecimation = 1 Odom\KalmanMeasurementNoise = 0.01 Odom\KalmanProcessNoise = 0.001 Odom\KeyFrameThr = 0.3 Odom\ParticleLambdaR = 100 Odom\ParticleLambdaT = 100 Odom\ParticleNoiseR = 0.002 Odom\ParticleNoiseT = 0.002 Odom\ParticleSize = 400 Odom\ResetCountdown = 0 Odom\ScanKeyFrameThr = 0.7 Odom\Strategy = 0 Odom\VisKeyFrameThr = 100 OdomF2M\BundleAdjustment = 0 OdomF2M\BundleAdjustmentMaxFrames = 0 OdomF2M\MaxNewFeatures = 0 OdomF2M\MaxSize = 2000 OdomF2M\ScanMaxSize = 2000 OdomF2M\ScanSubtractRadius = 0.05 OdomMono\InitMinFlow = 100 OdomMono\InitMinTranslation = 0.1 OdomMono\MaxVariance = 0.01 OdomMono\MinTranslation = 0.02 Optimizer\Epsilon = 1e-05 Optimizer\Iterations = 100 Optimizer\Robust = false Optimizer\Strategy = 0 Optimizer\VarianceIgnored = false RGBD\AngularUpdate = 0.01 RGBD\CreateOccupancyGrid = false RGBD\Enabled = true RGBD\GoalReachedRadius = 0.5 RGBD\GoalsSavedInUserData = false RGBD\LinearUpdate = 0.01 RGBD\LocalImmunizationRatio = 0.25 RGBD\LocalRadius = 10 RGBD\LoopClosureReextractFeatures = false RGBD\MaxLocalRetrieved = 2 RGBD\NeighborLinkRefining = false RGBD\NewMapOdomChangeDistance = 0 RGBD\OptimizeFromGraphEnd = false RGBD\OptimizeMaxError = 1 RGBD\PlanAngularVelocity = 0 RGBD\PlanLinearVelocity = 0 RGBD\PlanStuckIterations = 0 RGBD\ProximityAngle = 45 RGBD\ProximityBySpace = true RGBD\ProximityByTime = false RGBD\ProximityMaxGraphDepth = 0 RGBD\ProximityMaxPaths = 3 RGBD\ProximityPathFilteringRadius = 1 RGBD\ProximityPathMaxNeighbors = 10 RGBD\ProximityPathRawPosesUsed = true RGBD\ScanMatchingIdsSavedInLinks = true Reg\Force3DoF = true Reg\Strategy = 0 Reg\VarianceFromInliersCount = false Rtabmap\CreateIntermediateNodes = false Rtabmap\DetectionRate = 1 Rtabmap\ImageBufferSize = 1 Rtabmap\LoopRatio = 0 Rtabmap\LoopThr = 0.11 Rtabmap\MaxRetrieved = 2 Rtabmap\MemoryThr = 0 Rtabmap\PublishLastSignature = true Rtabmap\PublishLikelihood = true Rtabmap\PublishPdf = true Rtabmap\PublishStats = true Rtabmap\StartNewMapOnLoopClosure = false Rtabmap\StatisticLogged = false Rtabmap\StatisticLoggedHeaders = true Rtabmap\StatisticLogsBufferedInRAM = true Rtabmap\TimeThr = 700 Rtabmap\VhStrategy = 0 Rtabmap\WorkingDirectory = /home/nvidia/Documents/RTAB-Map SIFT\ContrastThreshold = 0.04 SIFT\EdgeThreshold = 10 SIFT\NFeatures = 0 SIFT\NOctaveLayers = 3 SIFT\Sigma = 1.6 SURF\Extended = false SURF\GpuKeypointsRatio = 0.01 SURF\GpuVersion = false SURF\HessianThreshold = 60 SURF\OctaveLayers = 2 SURF\Octaves = 4 SURF\Upright = false Stereo\Eps = 0.01 Stereo\Iterations = 30 Stereo\MaxDisparity = 128 Stereo\MaxLevel = 3 Stereo\MinDisparity = 1 Stereo\OpticalFlow = true Stereo\SSD = true Stereo\WinHeight = 3 Stereo\WinWidth = 15 StereoBM\BlockSize = 15 StereoBM\MinDisparity = 0 StereoBM\NumDisparities = 128 StereoBM\PreFilterCap = 31 StereoBM\PreFilterSize = 9 StereoBM\SpeckleRange = 4 StereoBM\SpeckleWindowSize = 100 StereoBM\TextureThreshold = 10 StereoBM\UniquenessRatio = 15 VhEp\MatchCountMin = 8 VhEp\RansacParam1 = 3 VhEp\RansacParam2 = 0.99 Vis\BundleAdjustment = 0 Vis\CorFlowEps = 0.01 Vis\CorFlowIterations = 30 Vis\CorFlowMaxLevel = 3 Vis\CorFlowWinSize = 16 Vis\CorGuessWinSize = 20 Vis\CorNNDR = 0.6 Vis\CorNNType = 1 Vis\CorType = 0 Vis\EpipolarGeometryVar = 0.02 Vis\EstimationType = 1 Vis\FeatureType = 6 Vis\ForwardEstOnly = true Vis\InlierDistance = 0.05 Vis\Iterations = 100 Vis\MaxDepth = 4 Vis\MaxFeatures = 1000 Vis\MinDepth = 0 Vis\MinInliers = 8 Vis\PnPFlags = 0 Vis\PnPRefineIterations = 1 Vis\PnPReprojError = 2 Vis\RefineIterations = 5 Vis\RoiRatios = 0.0 0.0 0.0 0.0 Vis\SubPixEps = 0.02 Vis\SubPixIterations = 0 Vis\SubPixWinSize = 3 g2o\Baseline = 0.075 g2o\Optimizer = 0 g2o\PixelVariance = 1 g2o\RobustKernelDelta = 8 g2o\Solver = 0 |
|
Administrator
|
Hi,
Seems like a TF problem (/base_link->/camera_link). Make sure rtabmap is launched with frame_id set to base frame of the robot, not camera_link. If the height of the camera is okay in TF, show in RVIZ the point cloud sent by the camera, and see if the points that should be on the ground matches with the ground plane of RVIZ. You may have to set Reference frame (at to of Displays view in RVIZ) to the base frame of the robot (e.g., base_link or base_footprint). What is your tf tree ($rosrun tf view_frames)? cheers, Mathieu |
|
|
Hi, thanks for the reply.
Here's my tf tree. 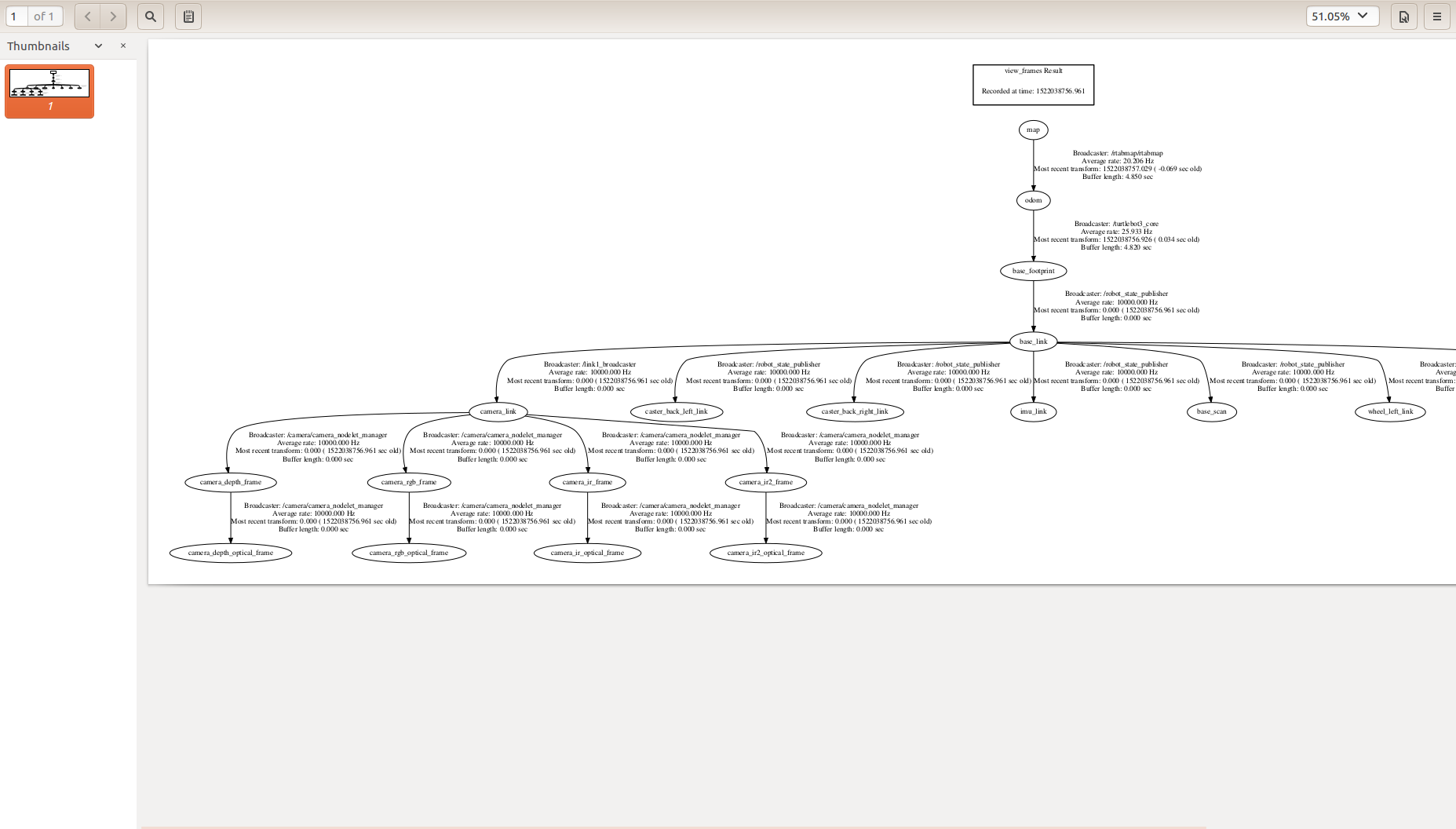 Below, i'm attaching first few lines of launch file. I've set frame_id as base_link. And camera height seems fine which is set by static tf. <launch> <node pkg="tf" type="static_transform_publisher" name="link1_broadcaster" args="0.065 -0.065 0.0935 0 0 0 1 base_link camera_link 100" /> <arg name="stereo" default="false"/> <arg name="rtabmapviz" default="true" /> <arg name="rviz" default="false" /> <arg name="localization" default="false"/> <arg name="cfg" default="/opt/ros/kinetic/share/rtabmap_ros/launch/config/rtabmap.ini" /> <arg name="gui_cfg" default="~/.ros/rtabmap_gui.ini" /> <arg name="rviz_cfg" default="$(find rtabmap_ros)/launch/config/rgbd.rviz" /> <arg name="frame_id" default="base_link"/> <arg name="namespace" default="rtabmap"/> <arg name="database_path" default="~/.ros/rtabmap.db"/> <arg name="queue_size" default="100"/> <arg name="wait_for_transform" default="0.2"/> <arg name="rtabmap_args" default=""/> <arg name="launch_prefix" default=""/> <arg if="$(arg stereo)" name="approx_sync" default="false"/> <arg unless="$(arg stereo)" name="approx_sync" default="true"/> <arg name="rgb_topic" default="/camera/rgb/image_rect_color" /> <arg name="depth_topic" default="/camera/depth_registered/image_raw" /> <arg name="camera_info_topic" default="/camera/rgb/camera_info" /> <arg name="stereo_namespace" default="/stereo_camera"/> <arg name="left_image_topic" default="$(arg stereo_namespace)/left/image_rect_color" /> <arg name="right_image_topic" default="$(arg stereo_namespace)/right/image_rect" /> <arg name="left_camera_info_topic" default="$(arg stereo_namespace)/left/camera_info" /> <arg name="right_camera_info_topic" default="$(arg stereo_namespace)/right/camera_info" /> <arg name="compressed" default="true"/> <arg name="rgb_image_transport" default="compressed"/> <arg name="depth_image_transport" default="compressedDepth"/> <arg name="subscribe_scan" default="false"/> <arg name="scan_topic" default="/scan"/> <arg name="subscribe_scan_cloud" default="false"/> <arg name="scan_cloud_topic" default="/velodyne_points"/> <arg name="visual_odometry" default="false"/> <arg name="odom_topic" default="/odom"/> it still seems not showing correct ground cloud points. 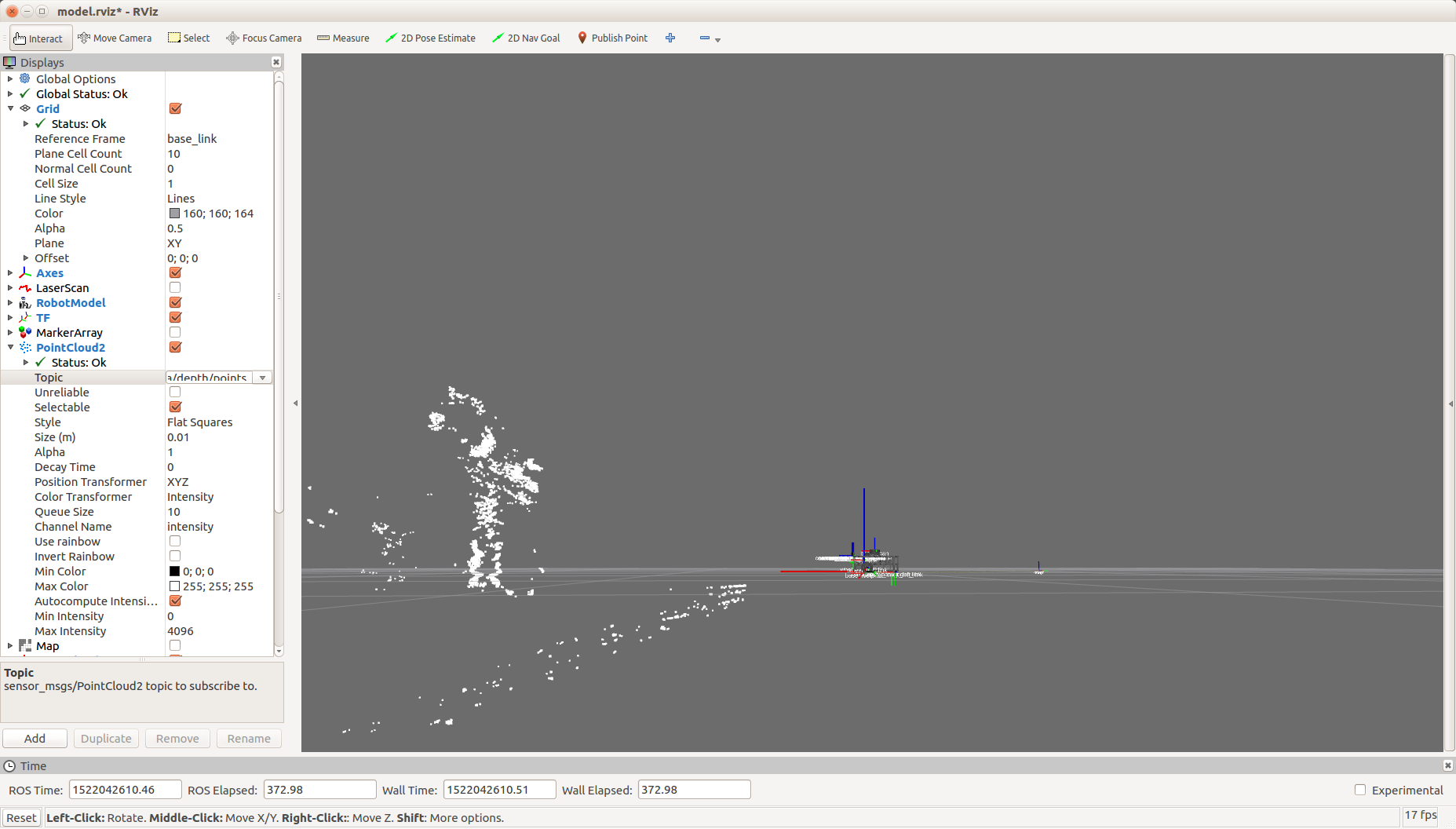 Any other possible mistakes that I'm making from launch file? |
|
Administrator
|
There are white points under the grid. The problem is coming from the camera, which poorly sees the ground. Is the ground reflective?
On rtabmap side, we could force at least that all these points are ground with "Grid/NormalsSegmentation" to false and "Grid/MaxGroundHeight" to 0.01. |
|
|
This post was updated on .
Thanks for your assistance Mat!
My room is kinda reflective, not as much as mirror. It is a bit shiny where I can see the shapes of boxes roughly that are on the floor. As you have suggested, I have set Grid/NormalsSegmentation = false and Grid/MaxGroundHeight=0.01. It seems OK when I put it in rviz as PointCloud2 (seems there is no ground though). In addition to above question, what is difference between below two topics.. topic 1: /rtabmap/octomap_occupied_space [sensor_msgs/PointCloud2] published by rtabmap topic 2: /occupied_cells_vis_array [visualization_msgs/MarkerArray] published by octomap_server They seem to produce different looking octomap in rviz. octomap_server subscribes depth point cloud published by camera. Are these different because rtabmap is filtering out unnecessary points? picture 1: /rtabmap/octomap_occupied_space [sensor_msgs/PointCloud2] published by rtabmap 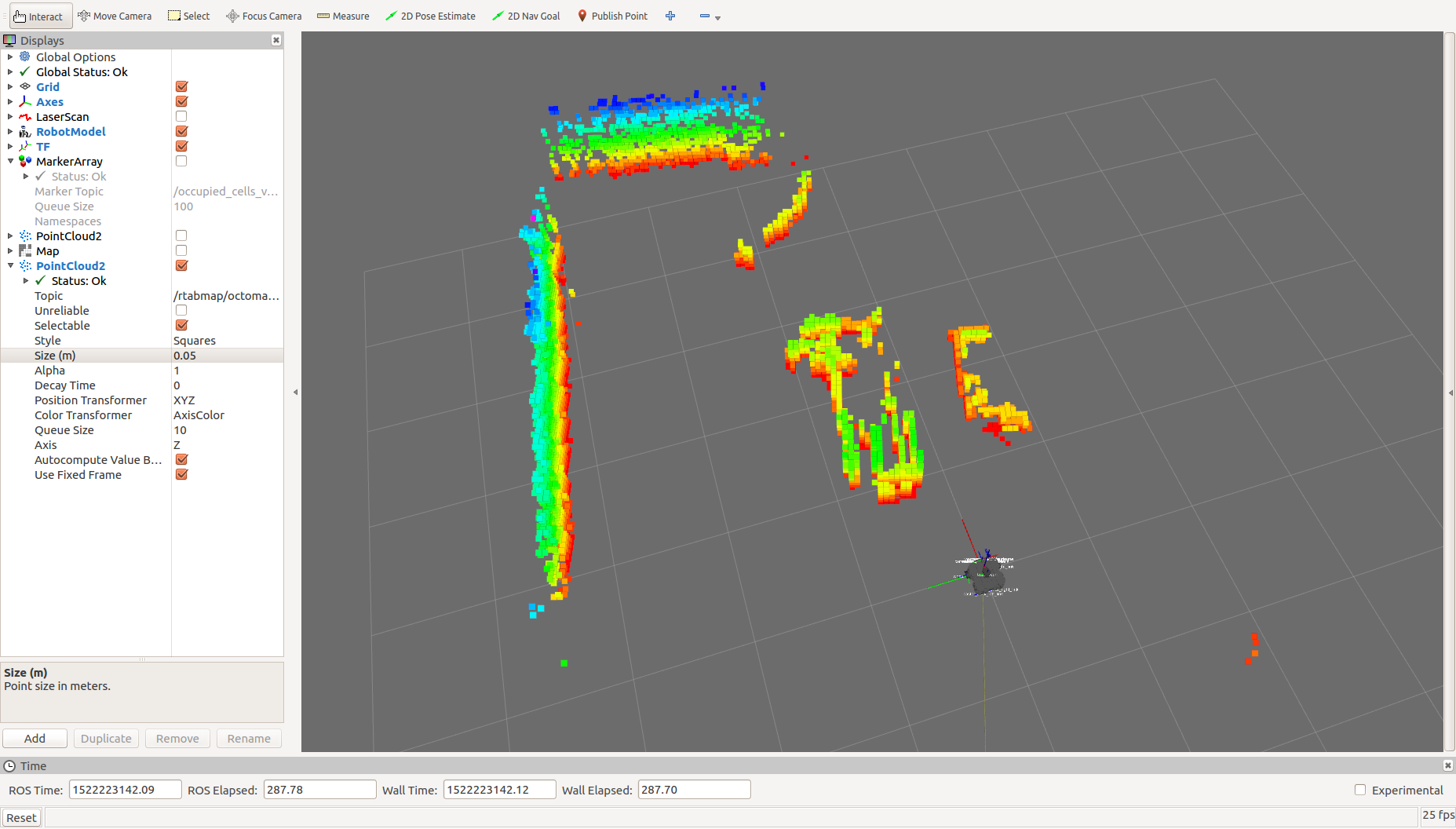 picture 2: /occupied_cells_vis_array [visualization_msgs/MarkerArray] published by octomap_server 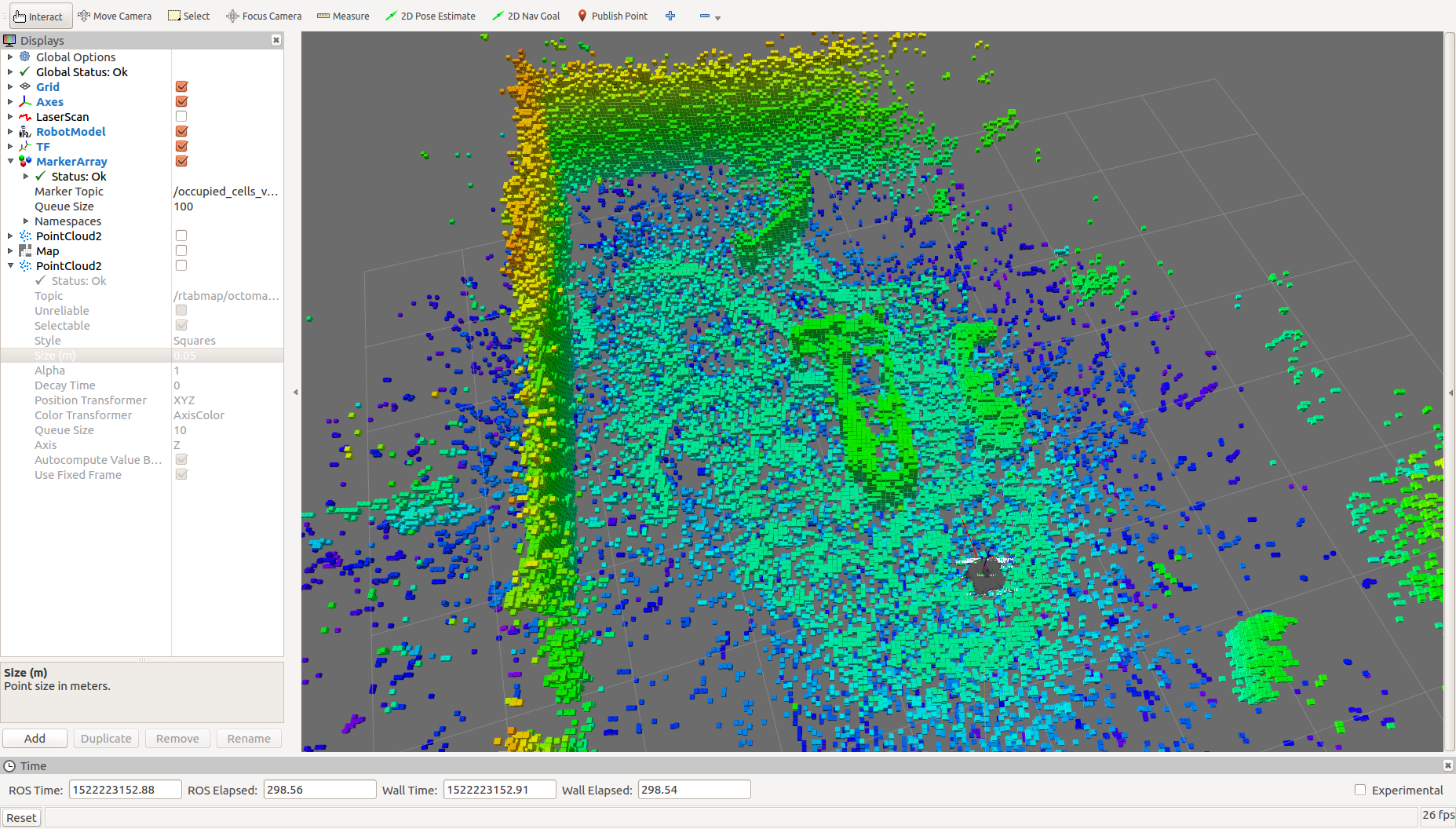 |
|
Administrator
|
Hi,
/rtabmap/octomap_occupied_space contains OctoMap cells that are occupied and obstacles /occupied_cells_vis_array contains OctoMap cells that are occupied To make is more clear, since this new commit, the cloud of /rtabmap/octomap_occupied_space will contain all occupied cells (like /occupied_cells_vis_array). I added /rtabmap/octomap_ground and /rtabmap/octomap_obstacles to show occupied cells that are libelled as ground and obstacles respectively. You can also show /rtabmap/octomap_grid (2d map) to see your points under the ground projected as ground cells in the map. cheers, Mathieu |
|
|
This post was updated on .
bro, can help on me too? slightly different case my case
|
«
Return to Official RTAB-Map Forum
|
1 view|%1 views
| Free forum by Nabble | Edit this page |