Hi,
I think the best way would be to record stereo images in a database without doing mapping, then use RTAB-Map standalone interface with this database as source to change live the stereo parameters. You can use
data_recorder.launch to record such database:
$ roslaunch rtabmap_ros data_recorder.launch subscribe_depth:=false subscribe_stereo:=true
On ctrl-c the database is saved to ~/.ros/output.db
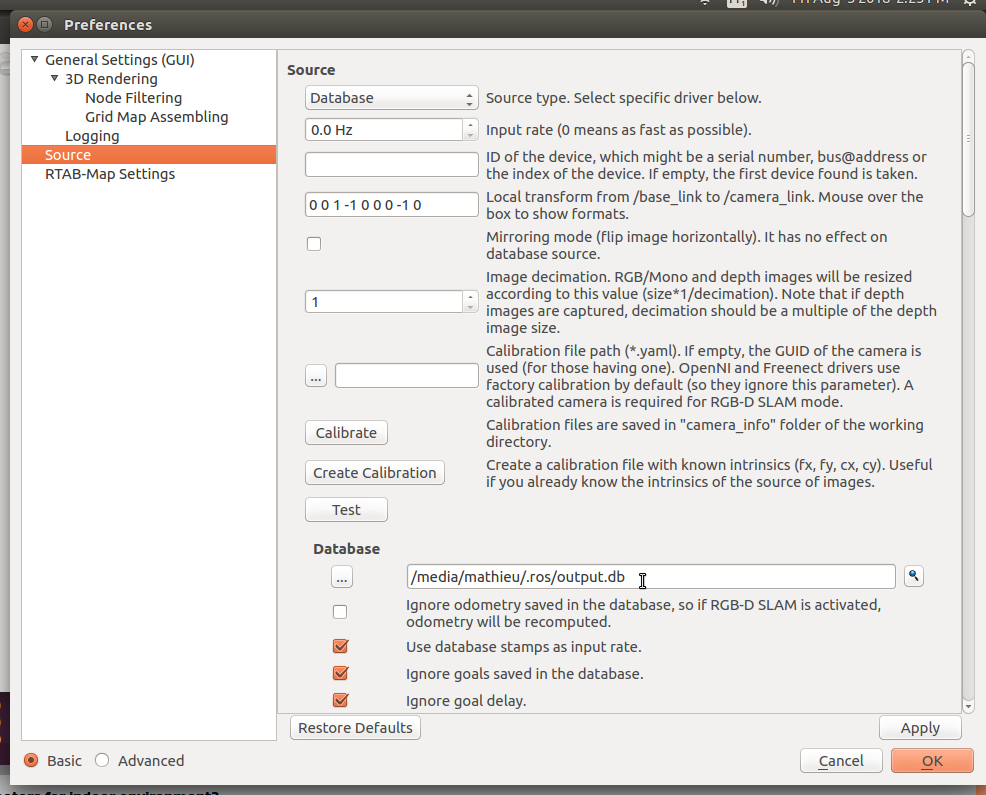
In RTAB-Map -> Preferences -> Source, select database source and set the path at the bottom:
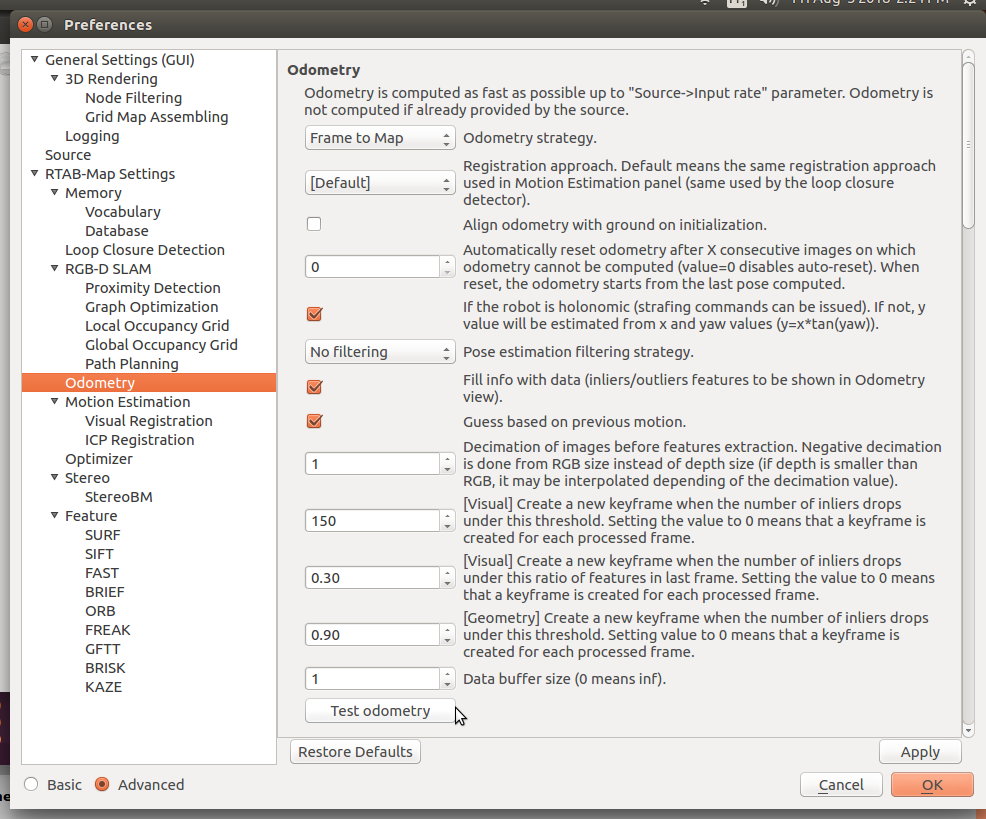
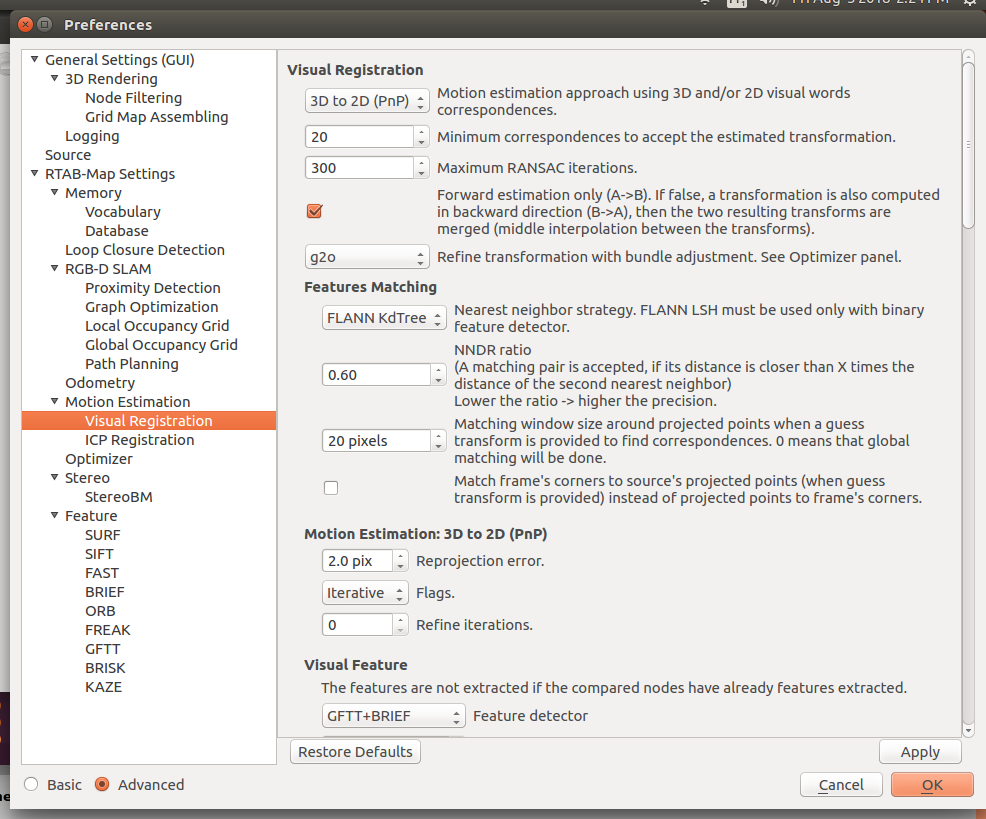
Parameters used by stereo odometry are under Odometry (you can press "Test odometry" button to just test odometry) and Visual Registration panels:
 EDIT:
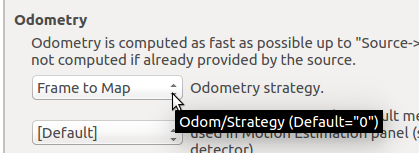
EDIT: To know how the parameters are called in ROS to set them to stereo_odometry node, mouse over the parameter like this:
cheers,
Mathieu

