Do you have an example (screenshot) of sparse map?
I added your lines in rgbd_mapping.launch and I can have an octomap shown in RVIZ which represents well the area I scanned.
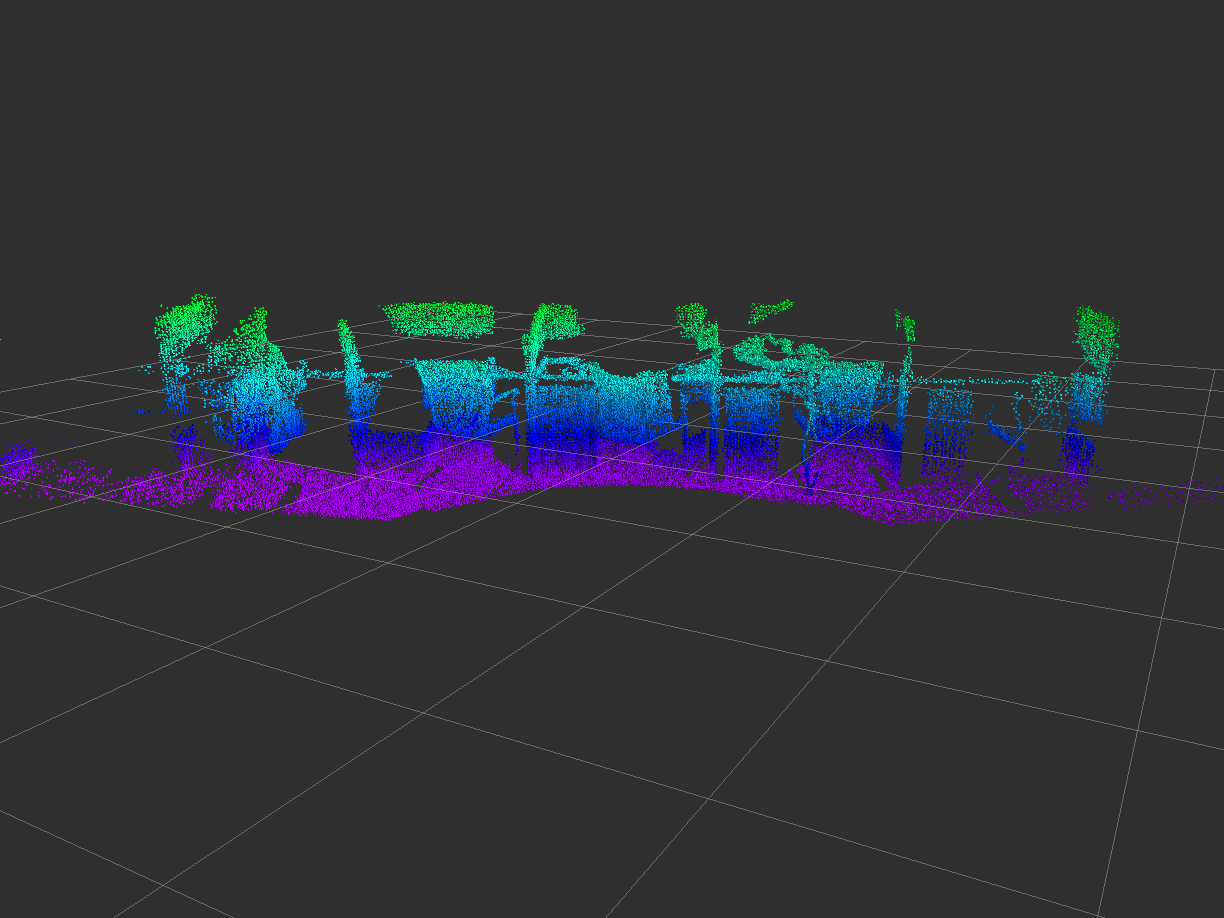
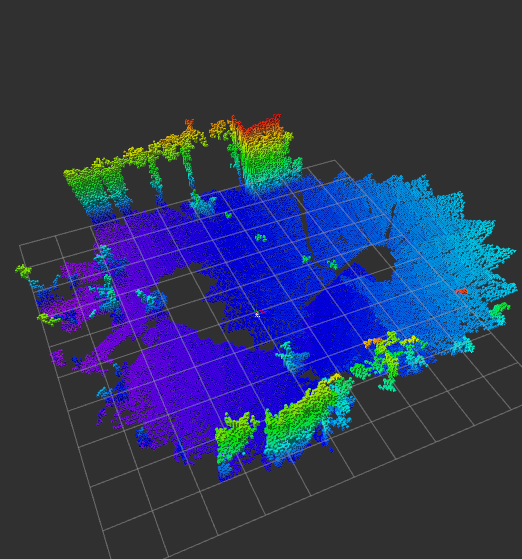
I did another test with the database from the IROS kinect challenge. There some screenshots (assembled_cloud):
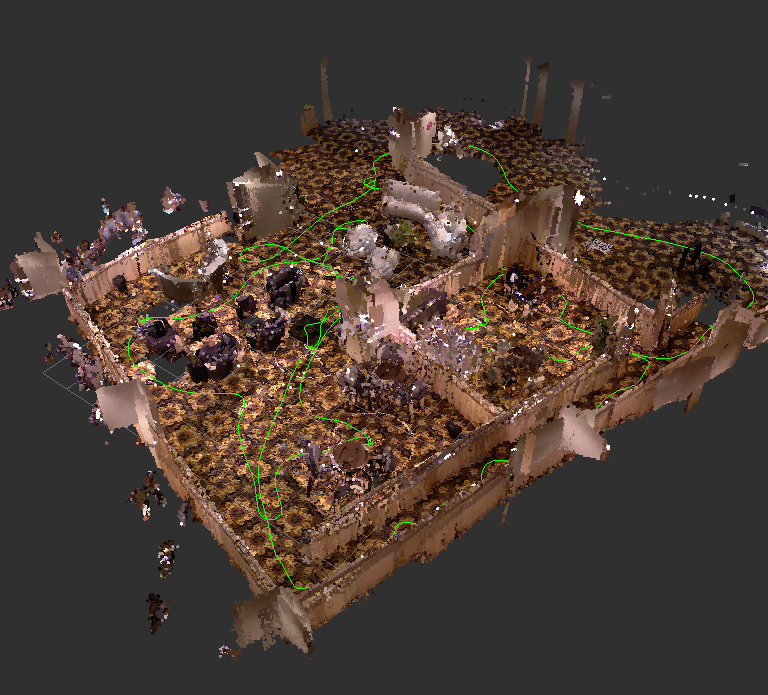
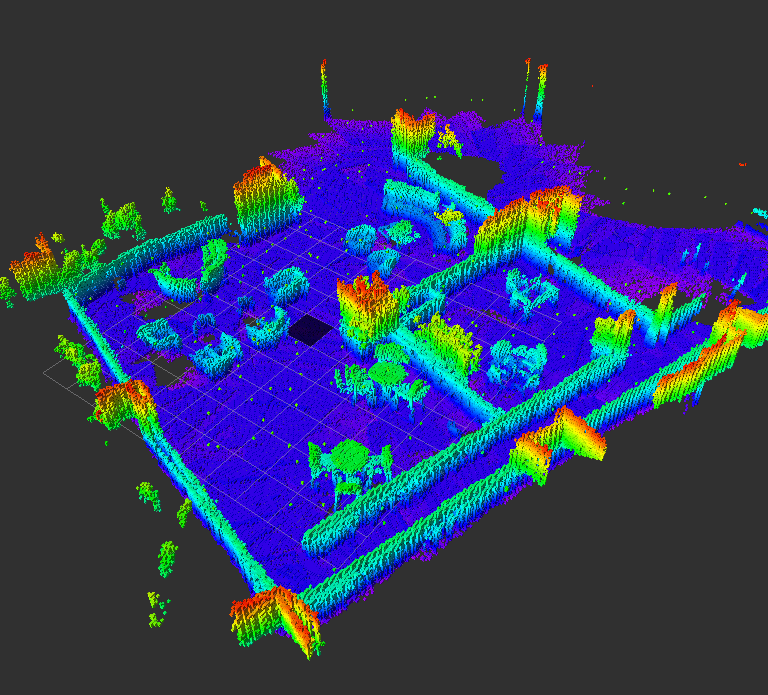
To reproduce the screenshots above, you will need the database "IROS14-kinect-challenge.db" from
here.
In multiple terminals, do:
$ roscore
$ rosrun rtabmap_ros rtabmap _Mem/IncrementalMemory:=false _database_path:=IROS14-kinect-challenge.db
$ rosrun rtabmap_ros map_assembler _cloud_voxel_size:=0.05
$ rosrun octomap_server octomap_server_node cloud_in:=assembled_clouds
$ rosrun rviz rviz /rtabmap/get_map:=/get_map
RVIZ:
* Set fixed frame to /map
* Add PointCloud2 display (topic /assembled_clouds)
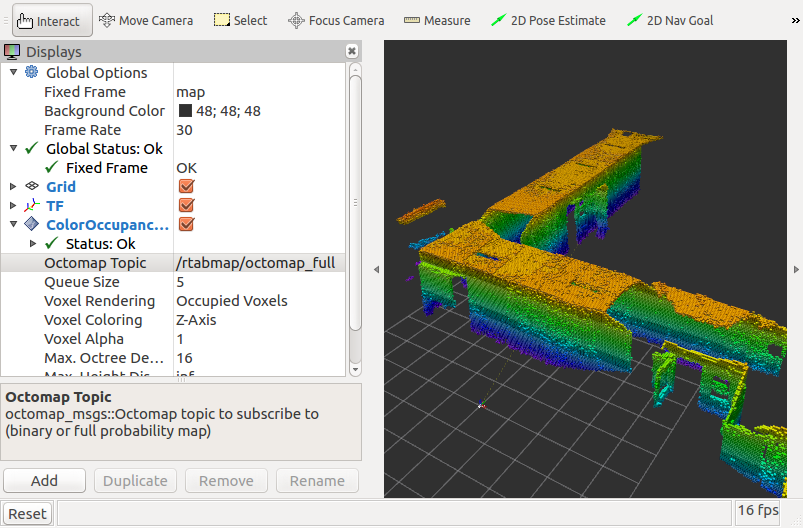
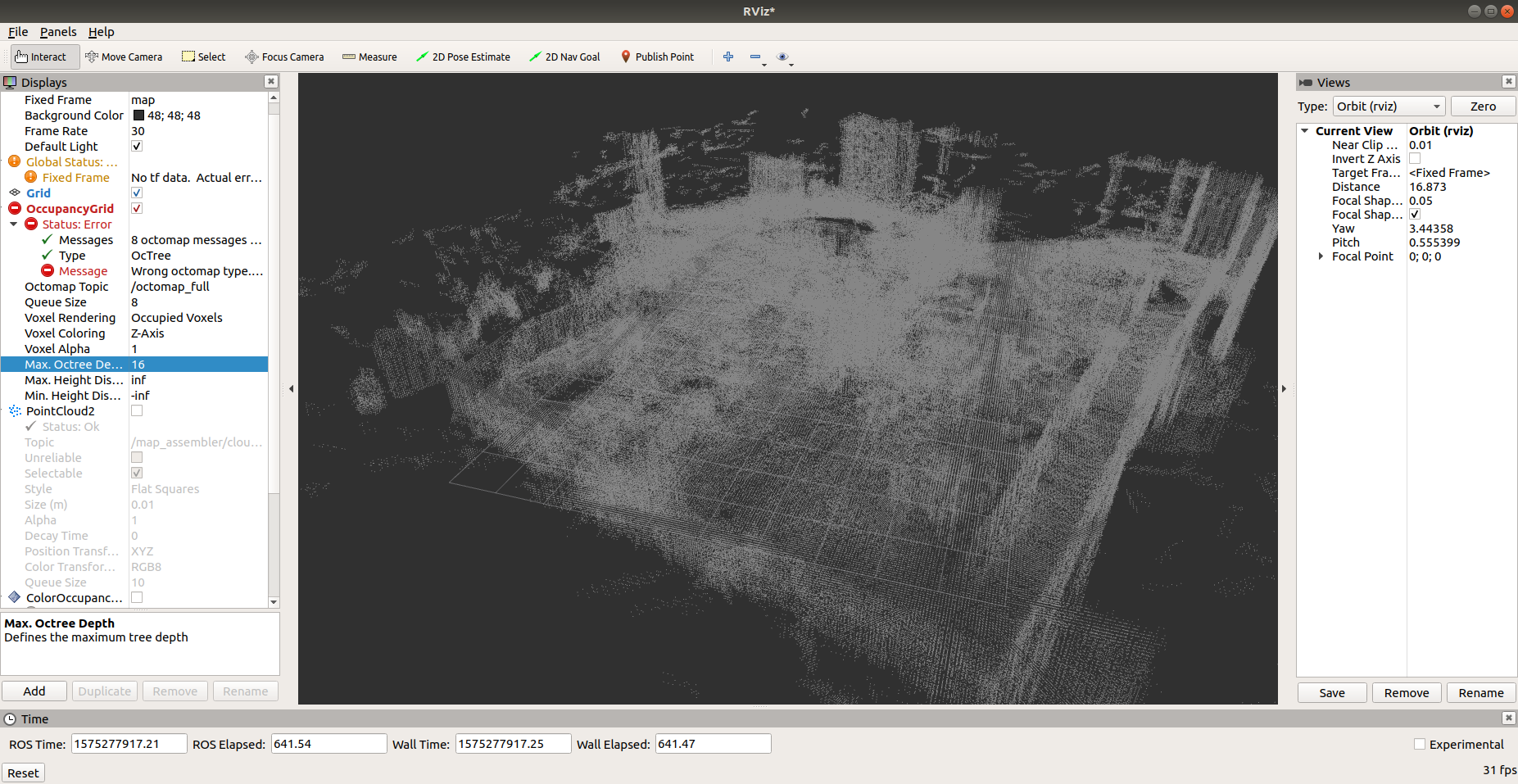
* Add octomap_rviz_plugins/OccupancyGrid display (topic /octomap_full)
Now call rtabmap "publish_map" service, this will fill the map_assembler's cache (all 3D point clouds) so the whole map can be assembled and published to octomap_server_node:
$ rosservice call /publish_map 1 1 0
This may take some time to generate, but you should see something like in the screenshot above. I don't have a very good GPU, so on my computer showing the octomap is very slow.