Can I use a bag taken using zed2i? (I used compression.)

Can I use a bag taken using zed2i? (I used compression.)

|
This post was updated on .
hello! Sorry for always asking questions.
The bag recorded using realsense can be used in rtabmap, but I want to use the bag newly recorded using zed2i in rtabmap.launch, but it does not work. Below is my error. roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" rgb_topic:=/zed2i/zed_node/left/image_rect_color/compressed depth_topic:=/zed2i/zed_node/depth/depth_registered camera_info_topic:=/zed2i/zed_node/depth/camera_info approx_sync:=false wait_imu_to_init:=false imu_topic:=/zed2i/zed_node/imu/data ... logging to /home/minsoo/.ros/log/9a0bc0d6-d3c3-11ed-9ac7-8ffbb74ea8ab/roslaunch-chominsoo-37587.log Checking log directory for disk usage. This may take a while. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB. started roslaunch server http://chominsoo:33895/ SUMMARY ======== CLEAR PARAMETERS * /rtabmap/rgbd_odometry/ * /rtabmap/rtabmap/ * /rtabmap/rtabmapviz/ PARAMETERS * /rosdistro: noetic * /rosversion: 1.15.15 * /rtabmap/rgbd_odometry/approx_sync: False * /rtabmap/rgbd_odometry/approx_sync_max_interval: 0.0 * /rtabmap/rgbd_odometry/config_path: * /rtabmap/rgbd_odometry/expected_update_rate: 0.0 * /rtabmap/rgbd_odometry/frame_id: camera_link * /rtabmap/rgbd_odometry/ground_truth_base_frame_id: * /rtabmap/rgbd_odometry/ground_truth_frame_id: * /rtabmap/rgbd_odometry/guess_frame_id: * /rtabmap/rgbd_odometry/guess_min_rotation: 0.0 * /rtabmap/rgbd_odometry/guess_min_translation: 0.0 * /rtabmap/rgbd_odometry/keep_color: False * /rtabmap/rgbd_odometry/max_update_rate: 0.0 * /rtabmap/rgbd_odometry/odom_frame_id: odom * /rtabmap/rgbd_odometry/publish_tf: True * /rtabmap/rgbd_odometry/queue_size: 10 * /rtabmap/rgbd_odometry/subscribe_rgbd: False * /rtabmap/rgbd_odometry/wait_for_transform_duration: 0.2 * /rtabmap/rgbd_odometry/wait_imu_to_init: False * /rtabmap/rtabmap/Mem/IncrementalMemory: true * /rtabmap/rtabmap/Mem/InitWMWithAllNodes: false * /rtabmap/rtabmap/approx_sync: False * /rtabmap/rtabmap/config_path: * /rtabmap/rtabmap/database_path: ~/.ros/rtabmap.db * /rtabmap/rtabmap/frame_id: camera_link * /rtabmap/rtabmap/gen_depth: False * /rtabmap/rtabmap/gen_depth_decimation: 1 * /rtabmap/rtabmap/gen_depth_fill_holes_error: 0.1 * /rtabmap/rtabmap/gen_depth_fill_holes_size: 0 * /rtabmap/rtabmap/gen_depth_fill_iterations: 1 * /rtabmap/rtabmap/gen_scan: False * /rtabmap/rtabmap/ground_truth_base_frame_id: * /rtabmap/rtabmap/ground_truth_frame_id: * /rtabmap/rtabmap/initial_pose: * /rtabmap/rtabmap/landmark_angular_variance: 9999.0 * /rtabmap/rtabmap/landmark_linear_variance: 0.0001 * /rtabmap/rtabmap/map_frame_id: map * /rtabmap/rtabmap/odom_frame_id: * /rtabmap/rtabmap/odom_frame_id_init: * /rtabmap/rtabmap/odom_sensor_sync: False * /rtabmap/rtabmap/odom_tf_angular_variance: 0.001 * /rtabmap/rtabmap/odom_tf_linear_variance: 0.001 * /rtabmap/rtabmap/publish_tf: True * /rtabmap/rtabmap/queue_size: 10 * /rtabmap/rtabmap/scan_cloud_max_points: 0 * /rtabmap/rtabmap/subscribe_depth: True * /rtabmap/rtabmap/subscribe_odom_info: True * /rtabmap/rtabmap/subscribe_rgb: True * /rtabmap/rtabmap/subscribe_rgbd: False * /rtabmap/rtabmap/subscribe_scan: False * /rtabmap/rtabmap/subscribe_scan_cloud: False * /rtabmap/rtabmap/subscribe_scan_descriptor: False * /rtabmap/rtabmap/subscribe_stereo: False * /rtabmap/rtabmap/subscribe_user_data: False * /rtabmap/rtabmap/wait_for_transform_duration: 0.2 * /rtabmap/rtabmapviz/approx_sync: False * /rtabmap/rtabmapviz/frame_id: camera_link * /rtabmap/rtabmapviz/odom_frame_id: * /rtabmap/rtabmapviz/queue_size: 10 * /rtabmap/rtabmapviz/subscribe_depth: True * /rtabmap/rtabmapviz/subscribe_odom_info: True * /rtabmap/rtabmapviz/subscribe_rgb: True * /rtabmap/rtabmapviz/subscribe_rgbd: False * /rtabmap/rtabmapviz/subscribe_scan: False * /rtabmap/rtabmapviz/subscribe_scan_cloud: False * /rtabmap/rtabmapviz/subscribe_scan_descriptor: False * /rtabmap/rtabmapviz/subscribe_stereo: False * /rtabmap/rtabmapviz/wait_for_transform_duration: 0.2 NODES /rtabmap/ rgbd_odometry (rtabmap_ros/rgbd_odometry) rtabmap (rtabmap_ros/rtabmap) rtabmapviz (rtabmap_ros/rtabmapviz) ROS_MASTER_URI=http://localhost:11311 process[rtabmap/rgbd_odometry-1]: started with pid [37607] process[rtabmap/rtabmap-2]: started with pid [37608] process[rtabmap/rtabmapviz-3]: started with pid [37609] [ INFO] [1680717220.083015836]: Starting node... [ INFO] [1680717220.100167566]: Initializing nodelet with 6 worker threads. [ INFO] [1680717220.104406169]: Initializing nodelet with 6 worker threads. [ INFO] [1680717220.143230866]: Odometry: frame_id = camera_link [ INFO] [1680717220.143258317]: Odometry: odom_frame_id = odom [ INFO] [1680717220.143271271]: Odometry: publish_tf = true [ INFO] [1680717220.143283253]: Odometry: wait_for_transform = true [ INFO] [1680717220.143301777]: Odometry: wait_for_transform_duration = 0.200000 [ INFO] [1680717220.143314361]: Odometry: log_to_rosout_level = 4 [ INFO] [1680717220.143341131]: Odometry: initial_pose = xyz=0.000000,0.000000,0.000000 rpy=0.000000,-0.000000,0.000000 [ INFO] [1680717220.143353754]: Odometry: ground_truth_frame_id = [ INFO] [1680717220.143365376]: Odometry: ground_truth_base_frame_id = [ INFO] [1680717220.143376967]: Odometry: config_path = [ INFO] [1680717220.143388569]: Odometry: publish_null_when_lost = true [ INFO] [1680717220.143399670]: Odometry: guess_frame_id = [ INFO] [1680717220.143411471]: Odometry: guess_min_translation = 0.000000 [ INFO] [1680717220.143423514]: Odometry: guess_min_rotation = 0.000000 [ INFO] [1680717220.143436318]: Odometry: guess_min_time = 0.000000 [ INFO] [1680717220.143448180]: Odometry: expected_update_rate = 0.000000 Hz [ INFO] [1680717220.143460032]: Odometry: max_update_rate = 0.000000 Hz [ INFO] [1680717220.143471784]: Odometry: min_update_rate = 0.000000 Hz [ INFO] [1680717220.143483205]: Odometry: wait_imu_to_init = false [ INFO] [1680717220.143506318]: Odometry: stereoParams_=0 visParams_=1 icpParams_=0 [ INFO] [1680717220.158928300]: Starting node... [ INFO] [1680717220.187731899]: /rtabmap/rtabmap(maps): map_filter_radius = 0.000000 [ INFO] [1680717220.187768637]: /rtabmap/rtabmap(maps): map_filter_angle = 30.000000 [ INFO] [1680717220.187784767]: /rtabmap/rtabmap(maps): map_cleanup = true [ INFO] [1680717220.187799214]: /rtabmap/rtabmap(maps): map_always_update = false [ INFO] [1680717220.187813330]: /rtabmap/rtabmap(maps): map_empty_ray_tracing = true [ INFO] [1680717220.187827296]: /rtabmap/rtabmap(maps): cloud_output_voxelized = true [ INFO] [1680717220.187856240]: /rtabmap/rtabmap(maps): cloud_subtract_filtering = false [ INFO] [1680717220.187871429]: /rtabmap/rtabmap(maps): cloud_subtract_filtering_min_neighbors = 2 [ INFO] [1680717220.188157230]: /rtabmap/rtabmap(maps): octomap_tree_depth = 16 [ INFO] [1680717220.216558681]: rtabmap: frame_id = camera_link [ INFO] [1680717220.216618413]: rtabmap: map_frame_id = map [ INFO] [1680717220.216659870]: rtabmap: log_to_rosout_level = 4 [ INFO] [1680717220.216703511]: rtabmap: initial_pose = [ INFO] [1680717220.216743315]: rtabmap: use_action_for_goal = false [ INFO] [1680717220.216784822]: rtabmap: tf_delay = 0.050000 [ INFO] [1680717220.216825187]: rtabmap: tf_tolerance = 0.100000 [ INFO] [1680717220.216863809]: rtabmap: odom_sensor_sync = false [ INFO] [1680717220.217788930]: rtabmap: gen_scan = false [ INFO] [1680717220.217841367]: rtabmap: gen_depth = false [ INFO] [1680717220.315254388]: rtabmapviz: Using configuration from "/home/minsoo/.ros/rtabmap_gui.ini" [ INFO] [1680717220.422601924]: Setting RTAB-Map parameter "Mem/IncrementalMemory"="true" [ INFO] [1680717220.422922050]: Setting RTAB-Map parameter "Mem/InitWMWithAllNodes"="false" [ INFO] [1680717220.566819302]: RGBDOdometry: approx_sync = false [ INFO] [1680717220.566841554]: RGBDOdometry: queue_size = 10 [ INFO] [1680717220.566852785]: RGBDOdometry: subscribe_rgbd = false [ INFO] [1680717220.566863124]: RGBDOdometry: rgbd_cameras = 1 [ INFO] [1680717220.566876258]: RGBDOdometry: keep_color = false [ WARN] [1680717220.570413918]: [image_transport] It looks like you are trying to subscribe directly to a transport-specific image topic '/zed2i/zed_node/left/image_rect_color/compressed', in which case you will likely get a connection error. Try subscribing to the base topic '/zed2i/zed_node/left/image_rect_color' instead with parameter ~image_transport set to 'compressed' (on the command line, _image_transport:=compressed). See http://ros.org/wiki/image_transport for details. [ INFO] [1680717220.579472235]: /rtabmap/rgbd_odometry subscribed to (exact sync): /zed2i/zed_node/left/image_rect_color/compressed \ /zed2i/zed_node/depth/depth_registered \ /zed2i/zed_node/depth/camera_info [ INFO] [1680717220.682460634]: RTAB-Map detection rate = 1.000000 Hz [ INFO] [1680717220.682805595]: rtabmap: Deleted database "/home/minsoo/.ros/rtabmap.db" (--delete_db_on_start or -d are set). [ INFO] [1680717220.682847063]: rtabmap: Using database from "/home/minsoo/.ros/rtabmap.db" (0 MB). [ INFO] [1680717220.826390818]: rtabmap: Database version = "0.20.23". [ INFO] [1680717220.826423148]: rtabmap: SLAM mode (Mem/IncrementalMemory=true) [ INFO] [1680717220.840330012]: /rtabmap/rtabmap: subscribe_depth = true [ INFO] [1680717220.840355309]: /rtabmap/rtabmap: subscribe_rgb = true [ INFO] [1680717220.840369134]: /rtabmap/rtabmap: subscribe_stereo = false [ INFO] [1680717220.840383151]: /rtabmap/rtabmap: subscribe_rgbd = false (rgbd_cameras=1) [ INFO] [1680717220.840397988]: /rtabmap/rtabmap: subscribe_odom_info = true [ INFO] [1680717220.840411183]: /rtabmap/rtabmap: subscribe_user_data = false [ INFO] [1680717220.840424578]: /rtabmap/rtabmap: subscribe_scan = false [ INFO] [1680717220.840439295]: /rtabmap/rtabmap: subscribe_scan_cloud = false [ INFO] [1680717220.840455144]: /rtabmap/rtabmap: subscribe_scan_descriptor = false [ INFO] [1680717220.840467848]: /rtabmap/rtabmap: queue_size = 10 [ INFO] [1680717220.840480602]: /rtabmap/rtabmap: approx_sync = false [ INFO] [1680717220.840503625]: Setup depth callback [ WARN] [1680717220.843662891]: [image_transport] It looks like you are trying to subscribe directly to a transport-specific image topic '/zed2i/zed_node/left/image_rect_color/compressed', in which case you will likely get a connection error. Try subscribing to the base topic '/zed2i/zed_node/left/image_rect_color' instead with parameter ~image_transport set to 'compressed' (on the command line, _image_transport:=compressed). See http://ros.org/wiki/image_transport for details. [ INFO] [1680717220.876645071]: /rtabmap/rtabmap subscribed to (exact sync): /rtabmap/odom \ /zed2i/zed_node/left/image_rect_color/compressed \ /zed2i/zed_node/depth/depth_registered \ /zed2i/zed_node/depth/camera_info \ /rtabmap/odom_info [ INFO] [1680717220.948194611]: rtabmap 0.20.23 started... libpng warning: iCCP: known incorrect sRGB profile libpng warning: iCCP: known incorrect sRGB profile libpng warning: iCCP: known incorrect sRGB profile [ INFO] [1680717221.153764272]: rtabmapviz: Reading parameters from the ROS server... [ INFO] [1680717221.285350640]: rtabmapviz: Parameters read = 359 [ INFO] [1680717221.285374384]: rtabmapviz: Parameters successfully read. [ INFO] [1680717221.567339808]: /rtabmap/rtabmapviz: subscribe_depth = true [ INFO] [1680717221.567364614]: /rtabmap/rtabmapviz: subscribe_rgb = true [ INFO] [1680717221.567375174]: /rtabmap/rtabmapviz: subscribe_stereo = false [ INFO] [1680717221.567386044]: /rtabmap/rtabmapviz: subscribe_rgbd = false (rgbd_cameras=1) [ INFO] [1680717221.567396644]: /rtabmap/rtabmapviz: subscribe_odom_info = true [ INFO] [1680717221.567409087]: /rtabmap/rtabmapviz: subscribe_user_data = false [ INFO] [1680717221.567418805]: /rtabmap/rtabmapviz: subscribe_scan = false [ INFO] [1680717221.567429695]: /rtabmap/rtabmapviz: subscribe_scan_cloud = false [ INFO] [1680717221.567443231]: /rtabmap/rtabmapviz: subscribe_scan_descriptor = false [ INFO] [1680717221.567454021]: /rtabmap/rtabmapviz: queue_size = 10 [ INFO] [1680717221.567464200]: /rtabmap/rtabmapviz: approx_sync = false [ INFO] [1680717221.567490759]: Setup depth callback [ WARN] [1680717221.586636597]: [image_transport] It looks like you are trying to subscribe directly to a transport-specific image topic '/zed2i/zed_node/left/image_rect_color/compressed', in which case you will likely get a connection error. Try subscribing to the base topic '/zed2i/zed_node/left/image_rect_color' instead with parameter ~image_transport set to 'compressed' (on the command line, _image_transport:=compressed). See http://ros.org/wiki/image_transport for details. [ INFO] [1680717221.616280048]: /rtabmap/rtabmapviz subscribed to (exact sync): /rtabmap/odom \ /zed2i/zed_node/left/image_rect_color/compressed \ /zed2i/zed_node/depth/depth_registered \ /zed2i/zed_node/depth/camera_info \ /rtabmap/odom_info [ INFO] [1680717221.616382418]: rtabmapviz started. [ WARN] [1680717228.613786654, 1680143339.556442282]: /rtabmap/rtabmap: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called. /rtabmap/rtabmap subscribed to (exact sync): /rtabmap/odom \ /zed2i/zed_node/left/image_rect_color/compressed \ /zed2i/zed_node/depth/depth_registered \ /zed2i/zed_node/depth/camera_info \ /rtabmap/odom_info [ WARN] [1680717228.613933747, 1680143339.556442282]: /rtabmap/rtabmapviz: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called. /rtabmap/rtabmapviz subscribed to (exact sync): /rtabmap/odom \ /zed2i/zed_node/left/image_rect_color/compressed \ /zed2i/zed_node/depth/depth_registered \ /zed2i/zed_node/depth/camera_info \ /rtabmap/odom_info [ WARN] [1680717228.613955578, 1680143339.556442282]: /rtabmap/rgbd_odometry: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called. /rtabmap/rgbd_odometry subscribed to (exact sync): /zed2i/zed_node/left/image_rect_color/compressed \ /zed2i/zed_node/depth/depth_registered \ /zed2i/zed_node/depth/camera_info [ WARN] [1680717233.613834677, 1680143344.556560696]: /rtabmap/rtabmapviz: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called. /rtabmap/rtabmapviz subscribed to (exact sync): /rtabmap/odom \ /zed2i/zed_node/left/image_rect_color/compressed \ /zed2i/zed_node/depth/depth_registered \ /zed2i/zed_node/depth/camera_info \ /rtabmap/odom_info [ WARN] [1680717233.613859423, 1680143344.556560696]: /rtabmap/rtabmap: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called. /rtabmap/rtabmap subscribed to (exact sync): /rtabmap/odom \ /zed2i/zed_node/left/image_rect_color/compressed \ /zed2i/zed_node/depth/depth_registered \ /zed2i/zed_node/depth/camera_info \ /rtabmap/odom_info [ WARN] [1680717233.614639424, 1680143344.556560696]: /rtabmap/rgbd_odometry: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called. /rtabmap/rgbd_odometry subscribed to (exact sync): /zed2i/zed_node/left/image_rect_color/compressed \ /zed2i/zed_node/depth/depth_registered \ /zed2i/zed_node/depth/camera_info [ WARN] [1680717238.620441742, 1680143349.563269350]: /rtabmap/rgbd_odometry: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called. /rtabmap/rgbd_odometry subscribed to (exact sync): /zed2i/zed_node/left/image_rect_color/compressed \ /zed2i/zed_node/depth/depth_registered \ /zed2i/zed_node/depth/camera_info [ WARN] [1680717238.620979391, 1680143349.563269350]: /rtabmap/rtabmap: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called. /rtabmap/rtabmap subscribed to (exact sync): /rtabmap/odom \ /zed2i/zed_node/left/image_rect_color/compressed \ /zed2i/zed_node/depth/depth_registered \ /zed2i/zed_node/depth/camera_info \ /rtabmap/odom_info !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!! I want to use only compressed bags. What should I do? This is my bag file. rosbag info my_bag_record4_2023-03-30-11-28-54.bag path: my_bag_record4_2023-03-30-11-28-54.bag version: 2.0 duration: 5:22s (322s) start: Mar 30 2023 11:28:54.55 (1680143334.55) end: Mar 30 2023 11:34:16.89 (1680143656.89) size: 6.7 GB messages: 126521 compression: none [5138/5138 chunks] types: geometry_msgs/PoseStamped [d3812c3cbc69362b77dc0b19b345f8f5] nav_msgs/Odometry [cd5e73d190d741a2f92e81eda573aca7] sensor_msgs/CameraInfo [c9a58c1b0b154e0e6da7578cb991d214] sensor_msgs/CompressedImage [8f7a12909da2c9d3332d540a0977563f] sensor_msgs/Image [060021388200f6f0f447d0fcd9c64743] sensor_msgs/Imu [6a62c6daae103f4ff57a132d6f95cec2] sensor_msgs/PointCloud2 [1158d486dd51d683ce2f1be655c3c181] tf2_msgs/TFMessage [94810edda583a504dfda3829e70d7eec] topics: /ouster/imu 32232 msgs : sensor_msgs/Imu /ouster/points 3224 msgs : sensor_msgs/PointCloud2 /tf_static 2 msgs : tf2_msgs/TFMessage (2 connections) /zed2i/zed_node/depth/camera_info 1914 msgs : sensor_msgs/CameraInfo /zed2i/zed_node/depth/depth_registered 1914 msgs : sensor_msgs/Image /zed2i/zed_node/depth/depth_registered/compressedDepth 1914 msgs : sensor_msgs/CompressedImage /zed2i/zed_node/imu/data 64172 msgs : sensor_msgs/Imu /zed2i/zed_node/left/camera_info 3828 msgs : sensor_msgs/CameraInfo /zed2i/zed_node/left/image_rect_color/compressed 1914 msgs : sensor_msgs/CompressedImage /zed2i/zed_node/odom 4834 msgs : nav_msgs/Odometry /zed2i/zed_node/pose 4834 msgs : geometry_msgs/PoseStamped /zed2i/zed_node/right/camera_info 3826 msgs : sensor_msgs/CameraInfo /zed2i/zed_node/right/image_rect_color/compressed 1913 msgs : sensor_msgs/CompressedImage ------------------------------------------------------------------------------------- topic hz 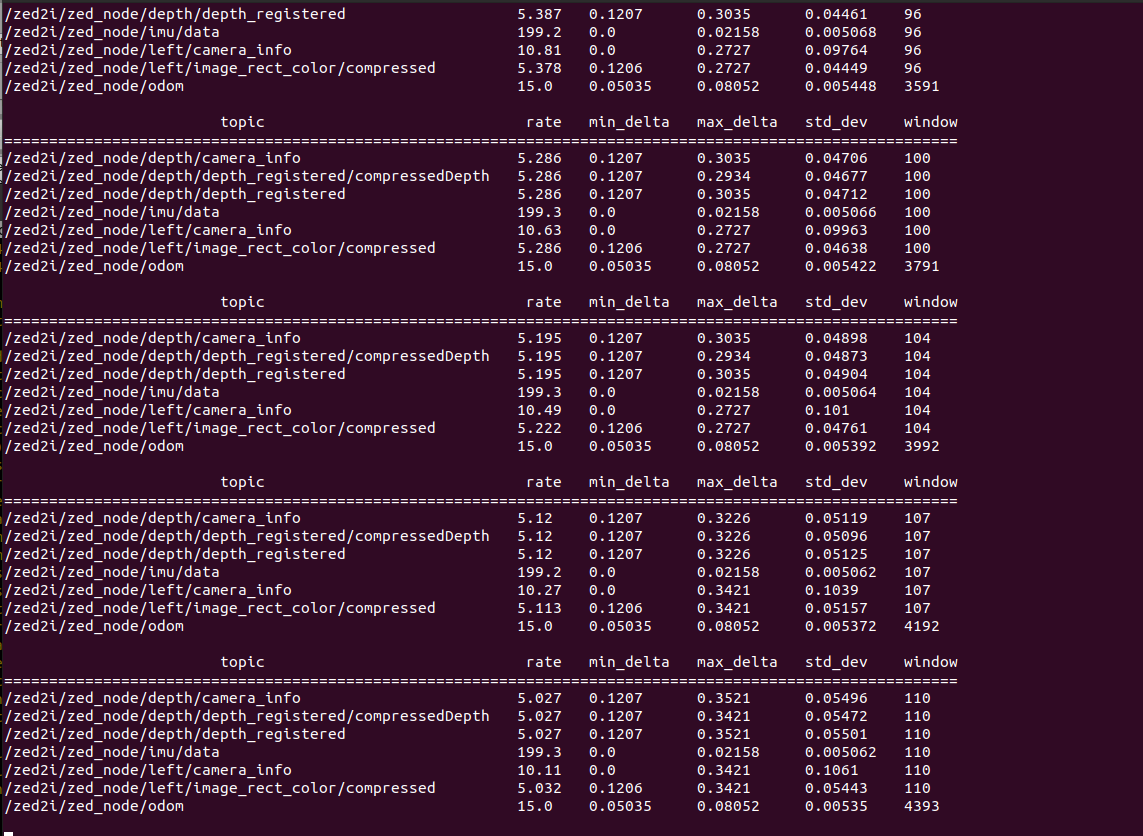 ------------------------------------------------------------------------------------ Bag file information if you need more! Please tell me how to upload bag file. thank you |
|
Administrator
|
You have this warning:
"[ WARN] [1680717220.570413918]: [image_transport] It looks like you are trying to subscribe directly to a transport-specific image topic '/zed2i/zed_node/left/image_rect_color/compressed', in which case you will likely get a connection error. Try subscribing to the base topic '/zed2i/zed_node/left/image_rect_color' instead with parameter ~image_transport set to 'compressed' (on the command line, _image_transport:=compressed). See http://ros.org/wiki/image_transport for details. " You should launch rtabmap.launch like: roslaunch rtabmap_ros rtabmap.launch \ rtabmap_args:="--delete_db_on_start" \ rgb_topic:=/zed2i/zed_node/left/image_rect_color \ depth_topic:=/zed2i/zed_node/depth/depth_registered \ camera_info_topic:=/zed2i/zed_node/depth/camera_info \ approx_sync:=false \ wait_imu_to_init:=false \ imu_topic:=/zed2i/zed_node/imu/data \ compressed:=true ... |
Re: Can I use a bag taken using zed2i? (I used compression.)
|
|
Thank you for your kind reply.
I ran the command as you said, but the following error occurred. I think it doesn't support depth format. May I know what the rtabmap depth format is? I would be grateful if you could give me feedback on how to resolve it. 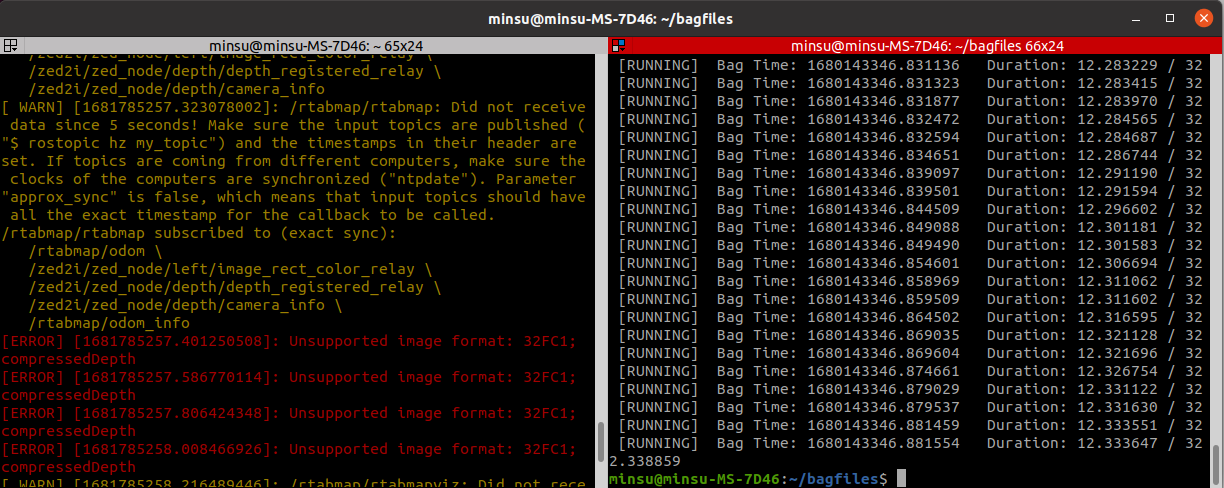
|
|
Administrator
|
Hi,
rtabmap does support depth 32FC1 (meters) format or 16UC1 (mm) format. Your error seems related to image_transport issue. Here is another similar issue where image_transform compressedDepth plugin naming changed between ros versions: https://github.com/introlab/rtabmap_ros/issues/509#issuecomment-733869451 The error is thrown from here: https://github.com/ros-perception/image_transport_plugins/blob/cca6781d47732e7fca078df950780c09dfca9225/compressed_depth_image_transport/src/codec.cpp#L72-L91 In your case, maybe compressedDepth plugin doesn't support 32FC1 format, only 16UC1. Try subscribing to not compressed depth image, or the compressed depth image topic using 16UC1 format if available form the camera driver. cheers, Mathieu |
Re: Can I use a bag taken using zed2i? (I used compression.)
|
|
Sorry for my belated reply!!!
I can't solve it no matter what... I decided not to use compressed images. So, /zed2i/zed_node/left/image_rect_color/compressed was decompressed and saved using the following code. ################################################################################################## import rosbag from sensor_msgs.msg import Image, CameraInfo input_bag = '/home/minsoo/catkin_ws/src/open3d/scripts/output1.bag' output_bag = '/home/minsoo/bagfiles/result1.bag' with rosbag.Bag(output_bag, 'w') as outbag: for topic, msg, t in rosbag.Bag(input_bag).read_messages(): if topic == '/zed2i/zed_node/left/image_rect_color/compressed': # Decompress the compressed image message from io import BytesIO from PIL import Image as PILImage import numpy as np import cv2 pil_img = PILImage.open(BytesIO(msg.data)) cv_img = np.array(pil_img) img = cv2.cvtColor(cv_img, cv2.COLOR_RGB2BGR) # Create an image message with the uncompressed image img_msg = Image() img_msg.header = msg.header img_msg.encoding = 'bgr8' img_msg.width = img.shape[1] img_msg.height = img.shape[0] img_msg.step = img.shape[1] * 3 img_msg.data = img.tostring() # Write the uncompressed image and its corresponding camera info to the output bag file outbag.write('/zed2i/zed_node/left/image_rect_color', img_msg, t) outbag.write('/zed2i/zed_node/left/camera_info', msg.header, t) elif topic in ['/zed2i/zed_node/depth/depth_registered', '/zed2i/zed_node/depth/camera_info', '/zed2i/zed_node/imu/data' '//tf_static']: # Write these topics as is to the output bag file outbag.write(topic, msg, t) ########################################################################################### And when I ran the rtabmap command you said, I got the following result. I searched for this error and it says that I need to fix the tf tree, but I don't know what to do. I would appreciate it if you could let me know. The picture below is the error content and hz. If possible, can you run my bag file directly? Sorry for asking too many questions. I will definitely do my best to become an advanced person. thank you 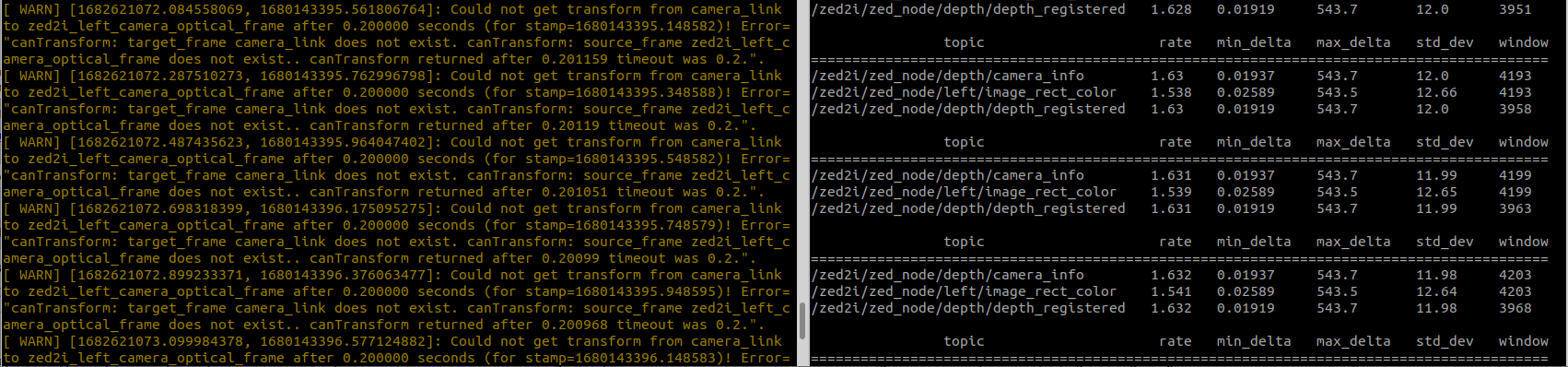
|
Re: Can I use a bag taken using zed2i? (I used compression.)
|
|
Apart from the problem above, I have an additional question.
Why do I only use half of the key points when I run a bag taken with zed in rtabmap? Below is a picture. 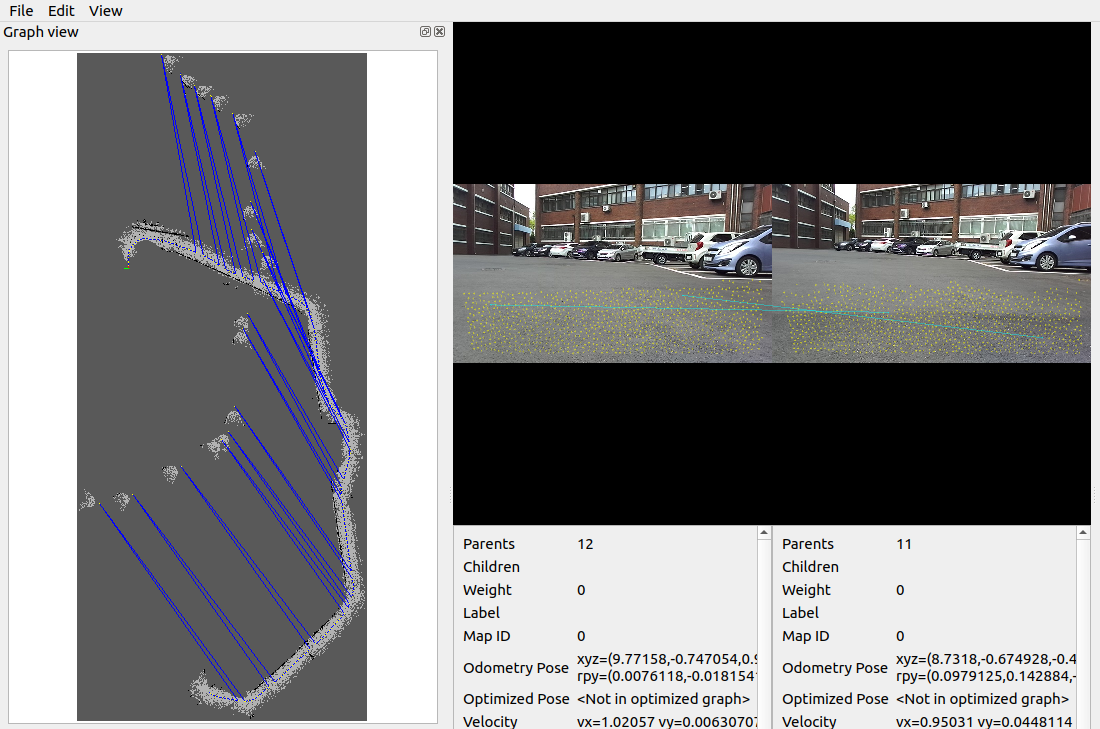 and If an incorrect pointcloud was created due to an incorrect key point, how can I correct it? Even after using the post-processing function, there is not much difference from before use. |
|
Administrator
|
Hi,
Looking at the left graph view, it looks like you have two nodes publishing on same TF. Maybe rtabmap odom and Zed odom? For the keypoints on the bottom half, show the depth image, I suspect that your current zed config limit the depth range. cheers, Mathieu |
Re: Can I use a bag taken using zed2i? (I used compression.)
|
|
Thank you very much for your reply.
Both problems above have been resolved. thank you. My skills are better than before, but I'm still a beginner. I have a few more questions. I would be grateful if you could let me know!! The closeLoop function could not be used when rtabmap was executed in binary. So, I built rtabmap from the source.  I succeeded in building g2o and gtsam together, and I tried to use it, but an error occurs when I run the command below... roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" rgb_topic:=/zed2i/zed_node/rbg/image_rect_color depth_topic:=/zed2i/zed_node/depth/depth_registered camera_info_topic:=/zed2i/zed_node/depth/camera_info approx_sync:=false wait_imu_to_init:=false imu_topic:=/zed2i/zed_node/imu/data ... logging to /home/minsoo/.ros/log/5f20ec74-f328-11ed-a97f-4b14571dcd02/roslaunch-chominsoo-31546.log Checking log directory for disk usage. This may take a while. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB. started roslaunch server http://chominsoo:39401/ SUMMARY ======== CLEAR PARAMETERS * /rtabmap/rgbd_odometry/ * /rtabmap/rtabmap/ * /rtabmap/rtabmap_viz/ PARAMETERS * /rosdistro: noetic * /rosversion: 1.16.0 * /rtabmap/rgbd_odometry/approx_sync: False * /rtabmap/rgbd_odometry/approx_sync_max_interval: 0.0 * /rtabmap/rgbd_odometry/config_path: * /rtabmap/rgbd_odometry/expected_update_rate: 0.0 * /rtabmap/rgbd_odometry/frame_id: camera_link * /rtabmap/rgbd_odometry/ground_truth_base_frame_id: * /rtabmap/rgbd_odometry/ground_truth_frame_id: * /rtabmap/rgbd_odometry/guess_frame_id: * /rtabmap/rgbd_odometry/guess_min_rotation: 0.0 * /rtabmap/rgbd_odometry/guess_min_translation: 0.0 * /rtabmap/rgbd_odometry/keep_color: False * /rtabmap/rgbd_odometry/max_update_rate: 0.0 * /rtabmap/rgbd_odometry/odom_frame_id: odom * /rtabmap/rgbd_odometry/publish_tf: True * /rtabmap/rgbd_odometry/queue_size: 10 * /rtabmap/rgbd_odometry/subscribe_rgbd: False * /rtabmap/rgbd_odometry/wait_for_transform_duration: 0.2 * /rtabmap/rgbd_odometry/wait_imu_to_init: False * /rtabmap/rtabmap/Mem/IncrementalMemory: true * /rtabmap/rtabmap/Mem/InitWMWithAllNodes: false * /rtabmap/rtabmap/approx_sync: False * /rtabmap/rtabmap/config_path: * /rtabmap/rtabmap/database_path: ~/.ros/rtabmap.db * /rtabmap/rtabmap/frame_id: camera_link * /rtabmap/rtabmap/gen_depth: False * /rtabmap/rtabmap/gen_depth_decimation: 1 * /rtabmap/rtabmap/gen_depth_fill_holes_error: 0.1 * /rtabmap/rtabmap/gen_depth_fill_holes_size: 0 * /rtabmap/rtabmap/gen_depth_fill_iterations: 1 * /rtabmap/rtabmap/gen_scan: False * /rtabmap/rtabmap/ground_truth_base_frame_id: * /rtabmap/rtabmap/ground_truth_frame_id: * /rtabmap/rtabmap/initial_pose: * /rtabmap/rtabmap/landmark_angular_variance: 9999.0 * /rtabmap/rtabmap/landmark_linear_variance: 0.0001 * /rtabmap/rtabmap/map_frame_id: map * /rtabmap/rtabmap/odom_frame_id: * /rtabmap/rtabmap/odom_frame_id_init: * /rtabmap/rtabmap/odom_sensor_sync: False * /rtabmap/rtabmap/odom_tf_angular_variance: 0.001 * /rtabmap/rtabmap/odom_tf_linear_variance: 0.001 * /rtabmap/rtabmap/publish_tf: True * /rtabmap/rtabmap/queue_size: 10 * /rtabmap/rtabmap/scan_cloud_max_points: 0 * /rtabmap/rtabmap/subscribe_depth: True * /rtabmap/rtabmap/subscribe_odom_info: True * /rtabmap/rtabmap/subscribe_rgb: True * /rtabmap/rtabmap/subscribe_rgbd: False * /rtabmap/rtabmap/subscribe_scan: False * /rtabmap/rtabmap/subscribe_scan_cloud: False * /rtabmap/rtabmap/subscribe_scan_descriptor: False * /rtabmap/rtabmap/subscribe_stereo: False * /rtabmap/rtabmap/subscribe_user_data: False * /rtabmap/rtabmap/wait_for_transform_duration: 0.2 * /rtabmap/rtabmap_viz/approx_sync: False * /rtabmap/rtabmap_viz/frame_id: camera_link * /rtabmap/rtabmap_viz/odom_frame_id: * /rtabmap/rtabmap_viz/queue_size: 10 * /rtabmap/rtabmap_viz/subscribe_depth: True * /rtabmap/rtabmap_viz/subscribe_odom_info: True * /rtabmap/rtabmap_viz/subscribe_rgb: True * /rtabmap/rtabmap_viz/subscribe_rgbd: False * /rtabmap/rtabmap_viz/subscribe_scan: False * /rtabmap/rtabmap_viz/subscribe_scan_cloud: False * /rtabmap/rtabmap_viz/subscribe_scan_descriptor: False * /rtabmap/rtabmap_viz/subscribe_stereo: False * /rtabmap/rtabmap_viz/wait_for_transform_duration: 0.2 NODES /rtabmap/ rgbd_odometry (rtabmap_odom/rgbd_odometry) rtabmap (rtabmap_slam/rtabmap) rtabmap_viz (rtabmap_viz/rtabmap_viz) ROS_MASTER_URI=http://localhost:11311 process[rtabmap/rgbd_odometry-1]: started with pid [31566] process[rtabmap/rtabmap-2]: started with pid [31567] process[rtabmap/rtabmap_viz-3]: started with pid [31568] [ INFO] [1684165812.513523011]: Starting node... [ INFO] [1684165812.537593649]: Initializing nodelet with 6 worker threads. [ INFO] [1684165812.543174222]: Initializing nodelet with 6 worker threads. [ INFO] [1684165812.578043501]: Starting node... [ INFO] [1684165812.712573563]: rtabmap_viz: Using configuration from "/home/minsoo/.ros/rtabmap_gui.ini" [rtabmap/rgbd_odometry-1] process has died [pid 31566, exit code -11, cmd /home/minsoo/catkin_ws/devel/lib/rtabmap_odom/rgbd_odometry --delete_db_on_start rgb/image:=/zed2i/zed_node/rbg/image_rect_color depth/image:=/zed2i/zed_node/depth/depth_registered rgb/camera_info:=/zed2i/zed_node/depth/camera_info rgbd_image:=rgbd_image_relay odom:=odom imu:=/zed2i/zed_node/imu/data __name:=rgbd_odometry __log:=/home/minsoo/.ros/log/5f20ec74-f328-11ed-a97f-4b14571dcd02/rtabmap-rgbd_odometry-1.log]. log file: /home/minsoo/.ros/log/5f20ec74-f328-11ed-a97f-4b14571dcd02/rtabmap-rgbd_odometry-1*.log [rtabmap/rtabmap-2] process has died [pid 31567, exit code -11, cmd /home/minsoo/catkin_ws/devel/lib/rtabmap_slam/rtabmap --delete_db_on_start rgb/image:=/zed2i/zed_node/rbg/image_rect_color depth/image:=/zed2i/zed_node/depth/depth_registered rgb/camera_info:=/zed2i/zed_node/depth/camera_info rgbd_image:=rgbd_image_relay left/image_rect:=/stereo_camera/left/image_rect_color right/image_rect:=/stereo_camera/right/image_rect left/camera_info:=/stereo_camera/left/camera_info right/camera_info:=/stereo_camera/right/camera_info scan:=/scan scan_cloud:=/scan_cloud scan_descriptor:=/scan_descriptor user_data:=/user_data user_data_async:=/user_data_async gps/fix:=/gps/fix tag_detections:=/tag_detections fiducial_transforms:=/fiducial_transforms odom:=odom imu:=/zed2i/zed_node/imu/data __name:=rtabmap __log:=/home/minsoo/.ros/log/5f20ec74-f328-11ed-a97f-4b14571dcd02/rtabmap-rtabmap-2.log]. log file: /home/minsoo/.ros/log/5f20ec74-f328-11ed-a97f-4b14571dcd02/rtabmap-rtabmap-2*.log libpng warning: iCCP: known incorrect sRGB profile libpng warning: iCCP: known incorrect sRGB profile libpng warning: iCCP: known incorrect sRGB profile [ INFO] [1684165813.581277958]: rtabmap_viz: Reading parameters from the ROS server... [ INFO] [1684165813.581900024]: rtabmap_viz: Cannot get rtabmap's parameters, waiting max 5 seconds in case the node has just been launched. ^C[rtabmap/rtabmap_viz-3] killing on exit [rtabmap/rtabmap_viz-3] escalating to SIGTERM shutting down processing monitor... ... shutting down processing monitor complete done |
Re: Can I use a bag taken using zed2i? (I used compression.)
|
|
rbg -> rgb
But still getting this error |
|
Administrator
|
Loop closure detection works with rtabmap binaries. You would need to build from source (opencv with xfeatures2d and nonfree modules, or even superpoint) only for large scale and more challenging environments.
You may try with the ros binaries. Those Seg faults errors are often related to bad compilation. |
Re: Can I use a bag taken using zed2i? (I used compression.)
|
|
thanks for the reply!
I built it as a source to use the functions of gtsam. I tried the following site, https://github.com/introlab/rtabmap_ros/issues/529 but I got the error as above. Anything wrong? |
|
Administrator
|
To get more info about process has died, you would need to launch the nodes in gdb, see https://github.com/introlab/rtabmap_ros/issues/28 (A)
|
«
Return to Official RTAB-Map Forum
|
1 view|%1 views
| Free forum by Nabble | Edit this page |