Can I use this bag?


|
path: 22.bag
version: 2.0 duration: 1:04s (64s) start: Jan 01 1970 09:00:00.00 (0.00) end: Jan 01 1970 09:01:04.11 (64.11) size: 6.4 GB messages: 192116 compression: none [3846/3846 chunks] types: diagnostic_msgs/KeyValue [cf57fdc6617a881a88c16e768132149c] geometry_msgs/Transform [ac9eff44abf714214112b05d54a3cf9b] realsense_msgs/ImuIntrinsic [aebdc2f8f9726f1c3ca823ab56e47429] realsense_msgs/StreamInfo [311d7e24eac31bb87271d041bf70ff7d] sensor_msgs/CameraInfo [c9a58c1b0b154e0e6da7578cb991d214] sensor_msgs/Image [060021388200f6f0f447d0fcd9c64743] sensor_msgs/Imu [6a62c6daae103f4ff57a132d6f95cec2] std_msgs/Float32 [73fcbf46b49191e672908e50842a83d4] std_msgs/String [992ce8a1687cec8c8bd883ec73ca41d1] std_msgs/UInt32 [304a39449588c7f8ce2df6e8001c5fce] topics: /device_0/info 13 msgs : diagnostic_msgs/KeyValue /device_0/sensor_0/Depth_0/image/data 1922 msgs : sensor_msgs/Image /device_0/sensor_0/Depth_0/image/metadata 46128 msgs : diagnostic_msgs/KeyValue /device_0/sensor_0/Depth_0/info 1 msg : realsense_msgs/StreamInfo /device_0/sensor_0/Depth_0/info/camera_info 1 msg : sensor_msgs/CameraInfo /device_0/sensor_0/Depth_0/tf/0 1 msg : geometry_msgs/Transform /device_0/sensor_0/info 2 msgs : diagnostic_msgs/KeyValue /device_0/sensor_0/option/Asic_Temperature/description 1 msg : std_msgs/String /device_0/sensor_0/option/Asic_Temperature/value 1 msg : std_msgs/Float32 /device_0/sensor_0/option/Auto_Exposure_Limit/description 1 msg : std_msgs/String /device_0/sensor_0/option/Auto_Exposure_Limit/value 1 msg : std_msgs/Float32 /device_0/sensor_0/option/Auto_Exposure_Limit_Toggle/description 1 msg : std_msgs/String /device_0/sensor_0/option/Auto_Exposure_Limit_Toggle/value 1 msg : std_msgs/Float32 /device_0/sensor_0/option/Auto_Gain_Limit/description 1 msg : std_msgs/String /device_0/sensor_0/option/Auto_Gain_Limit/value 1 msg : std_msgs/Float32 /device_0/sensor_0/option/Auto_Gain_Limit_Toggle/description 1 msg : std_msgs/String /device_0/sensor_0/option/Auto_Gain_Limit_Toggle/value 1 msg : std_msgs/Float32 /device_0/sensor_0/option/Depth_Units/description 1 msg : std_msgs/String /device_0/sensor_0/option/Depth_Units/value 1 msg : std_msgs/Float32 /device_0/sensor_0/option/Emitter_Always_On/description 1 msg : std_msgs/String /device_0/sensor_0/option/Emitter_Always_On/value 1 msg : std_msgs/Float32 /device_0/sensor_0/option/Emitter_Enabled/description 1 msg : std_msgs/String /device_0/sensor_0/option/Emitter_Enabled/value 1 msg : std_msgs/Float32 /device_0/sensor_0/option/Emitter_On_Off/description 1 msg : std_msgs/String /device_0/sensor_0/option/Emitter_On_Off/value 1 msg : std_msgs/Float32 /device_0/sensor_0/option/Enable_Auto_Exposure/description 1 msg : std_msgs/String /device_0/sensor_0/option/Enable_Auto_Exposure/value 1 msg : std_msgs/Float32 /device_0/sensor_0/option/Error_Polling_Enabled/description 1 msg : std_msgs/String /device_0/sensor_0/option/Error_Polling_Enabled/value 1 msg : std_msgs/Float32 /device_0/sensor_0/option/Exposure/description 1 msg : std_msgs/String /device_0/sensor_0/option/Exposure/value 1 msg : std_msgs/Float32 /device_0/sensor_0/option/Frames_Queue_Size/description 1 msg : std_msgs/String /device_0/sensor_0/option/Frames_Queue_Size/value 1 msg : std_msgs/Float32 /device_0/sensor_0/option/Gain/description 1 msg : std_msgs/String /device_0/sensor_0/option/Gain/value 1 msg : std_msgs/Float32 /device_0/sensor_0/option/Global_Time_Enabled/description 1 msg : std_msgs/String /device_0/sensor_0/option/Global_Time_Enabled/value 1 msg : std_msgs/Float32 /device_0/sensor_0/option/Hdr_Enabled/description 1 msg : std_msgs/String /device_0/sensor_0/option/Hdr_Enabled/value 1 msg : std_msgs/Float32 /device_0/sensor_0/option/Inter_Cam_Sync_Mode/description 1 msg : std_msgs/String /device_0/sensor_0/option/Inter_Cam_Sync_Mode/value 1 msg : std_msgs/Float32 /device_0/sensor_0/option/Laser_Power/description 1 msg : std_msgs/String /device_0/sensor_0/option/Laser_Power/value 1 msg : std_msgs/Float32 /device_0/sensor_0/option/Output_Trigger_Enabled/description 1 msg : std_msgs/String /device_0/sensor_0/option/Output_Trigger_Enabled/value 1 msg : std_msgs/Float32 /device_0/sensor_0/option/Projector_Temperature/description 1 msg : std_msgs/String /device_0/sensor_0/option/Projector_Temperature/value 1 msg : std_msgs/Float32 /device_0/sensor_0/option/Sequence_Id/description 1 msg : std_msgs/String /device_0/sensor_0/option/Sequence_Id/value 1 msg : std_msgs/Float32 /device_0/sensor_0/option/Sequence_Name/description 1 msg : std_msgs/String /device_0/sensor_0/option/Sequence_Name/value 1 msg : std_msgs/Float32 /device_0/sensor_0/option/Sequence_Size/description 1 msg : std_msgs/String /device_0/sensor_0/option/Sequence_Size/value 1 msg : std_msgs/Float32 /device_0/sensor_0/option/Stereo_Baseline/description 1 msg : std_msgs/String /device_0/sensor_0/option/Stereo_Baseline/value 1 msg : std_msgs/Float32 /device_0/sensor_0/option/Thermal_Compensation/description 1 msg : std_msgs/String /device_0/sensor_0/option/Thermal_Compensation/value 1 msg : std_msgs/Float32 /device_0/sensor_0/option/Visual_Preset/description 1 msg : std_msgs/String /device_0/sensor_0/option/Visual_Preset/value 1 msg : std_msgs/Float32 /device_0/sensor_0/post_processing 10 msgs : std_msgs/String /device_0/sensor_1/Color_0/image/data 1923 msgs : sensor_msgs/Image /device_0/sensor_1/Color_0/image/metadata 40383 msgs : diagnostic_msgs/KeyValue /device_0/sensor_1/Color_0/info 1 msg : realsense_msgs/StreamInfo /device_0/sensor_1/Color_0/info/camera_info 1 msg : sensor_msgs/CameraInfo /device_0/sensor_1/Color_0/tf/0 1 msg : geometry_msgs/Transform /device_0/sensor_1/info 2 msgs : diagnostic_msgs/KeyValue /device_0/sensor_1/option/Auto_Exposure_Priority/description 1 msg : std_msgs/String /device_0/sensor_1/option/Auto_Exposure_Priority/value 1 msg : std_msgs/Float32 /device_0/sensor_1/option/Backlight_Compensation/description 1 msg : std_msgs/String /device_0/sensor_1/option/Backlight_Compensation/value 1 msg : std_msgs/Float32 /device_0/sensor_1/option/Brightness/description 1 msg : std_msgs/String /device_0/sensor_1/option/Brightness/value 1 msg : std_msgs/Float32 /device_0/sensor_1/option/Contrast/description 1 msg : std_msgs/String /device_0/sensor_1/option/Contrast/value 1 msg : std_msgs/Float32 /device_0/sensor_1/option/Enable_Auto_Exposure/description 1 msg : std_msgs/String /device_0/sensor_1/option/Enable_Auto_Exposure/value 1 msg : std_msgs/Float32 /device_0/sensor_1/option/Enable_Auto_White_Balance/description 1 msg : std_msgs/String /device_0/sensor_1/option/Enable_Auto_White_Balance/value 1 msg : std_msgs/Float32 /device_0/sensor_1/option/Exposure/description 1 msg : std_msgs/String /device_0/sensor_1/option/Exposure/value 1 msg : std_msgs/Float32 /device_0/sensor_1/option/Frames_Queue_Size/description 1 msg : std_msgs/String /device_0/sensor_1/option/Frames_Queue_Size/value 1 msg : std_msgs/Float32 /device_0/sensor_1/option/Gain/description 1 msg : std_msgs/String /device_0/sensor_1/option/Gain/value 1 msg : std_msgs/Float32 /device_0/sensor_1/option/Gamma/description 1 msg : std_msgs/String /device_0/sensor_1/option/Gamma/value 1 msg : std_msgs/Float32 /device_0/sensor_1/option/Global_Time_Enabled/description 1 msg : std_msgs/String /device_0/sensor_1/option/Global_Time_Enabled/value 1 msg : std_msgs/Float32 /device_0/sensor_1/option/Hue/description 1 msg : std_msgs/String /device_0/sensor_1/option/Hue/value 1 msg : std_msgs/Float32 /device_0/sensor_1/option/Power_Line_Frequency/description 1 msg : std_msgs/String /device_0/sensor_1/option/Power_Line_Frequency/value 1 msg : std_msgs/Float32 /device_0/sensor_1/option/Saturation/description 1 msg : std_msgs/String /device_0/sensor_1/option/Saturation/value 1 msg : std_msgs/Float32 /device_0/sensor_1/option/Sharpness/description 1 msg : std_msgs/String /device_0/sensor_1/option/Sharpness/value 1 msg : std_msgs/Float32 /device_0/sensor_1/option/White_Balance/description 1 msg : std_msgs/String /device_0/sensor_1/option/White_Balance/value 1 msg : std_msgs/Float32 /device_0/sensor_1/post_processing 1 msg : std_msgs/String /device_0/sensor_2/Accel_0/imu/data 4100 msgs : sensor_msgs/Imu /device_0/sensor_2/Accel_0/imu/metadata 20500 msgs : diagnostic_msgs/KeyValue /device_0/sensor_2/Accel_0/imu_intrinsic 1 msg : realsense_msgs/ImuIntrinsic /device_0/sensor_2/Accel_0/info 1 msg : realsense_msgs/StreamInfo /device_0/sensor_2/Accel_0/tf/0 1 msg : geometry_msgs/Transform /device_0/sensor_2/Gyro_0/imu/data 12838 msgs : sensor_msgs/Imu /device_0/sensor_2/Gyro_0/imu/metadata 64190 msgs : diagnostic_msgs/KeyValue /device_0/sensor_2/Gyro_0/imu_intrinsic 1 msg : realsense_msgs/ImuIntrinsic /device_0/sensor_2/Gyro_0/info 1 msg : realsense_msgs/StreamInfo /device_0/sensor_2/Gyro_0/tf/0 1 msg : geometry_msgs/Transform /device_0/sensor_2/info 1 msg : diagnostic_msgs/KeyValue /device_0/sensor_2/option/Enable_Motion_Correction/description 1 msg : std_msgs/String /device_0/sensor_2/option/Enable_Motion_Correction/value 1 msg : std_msgs/Float32 /device_0/sensor_2/option/Frames_Queue_Size/description 1 msg : std_msgs/String /device_0/sensor_2/option/Frames_Queue_Size/value 1 msg : std_msgs/Float32 /device_0/sensor_2/option/Global_Time_Enabled/description 1 msg : std_msgs/String /device_0/sensor_2/option/Global_Time_Enabled/value 1 msg : std_msgs/Float32 /file_version 1 msg : std_msgs/UInt32 This bag was shot with realsense d455. Any help would be greatly appreciated. |
|
|
sorry. I didn't say what to do. We will use it for "roslaunch rtabmap_ros rtabmap.launch".
|
|
Administrator
|
Hi,
there is only 1 camera_info msg per camera, while there should be as many as the images. Are the depth images aligned/registered with color camera? If so and if you can get as many camera_info than color images, you may do: roslaunch rtabmap_ros rtabmap.launch args:="-d" \ rgb_topic:=/device_0/sensor_1/Color_0/image/data \ camera_info_topic:=/device_0/sensor_1/Color_0/info/camera_info \ depth_topic:=/device_0/sensor_0/Depth_0/image/data But for D455, you may check the example here: http://wiki.ros.org/rtabmap_ros/Tutorials/HandHeldMapping (follow D435i instructions). cheers, Mathieu |
|
|
This post was updated on .
thank you for your answer! But When I ran it like you said, I got this error.
roslaunch rtabmap_ros rtabmap.launch args:="-d" \ > rgb_topic:=/device_0/sensor_1/Color_0/image/data \ > camera_info_topic:=/device_0/sensor_1/Color_0/info/camera_info \ > depth_topic:=/device_0/sensor_0/Depth_0/image/data WARNING: Package name "Open3d" does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes. ... logging to /home/minsoo/.ros/log/6c41e536-bbf9-11ed-babe-b7cecc534104/roslaunch-chominsoo-4252.log Checking log directory for disk usage. This may take a while. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB. WARNING: Package name "Open3d" does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes. started roslaunch server http://chominsoo:43909/ SUMMARY ======== CLEAR PARAMETERS * /rtabmap/rgbd_odometry/ * /rtabmap/rtabmap/ * /rtabmap/rtabmapviz/ PARAMETERS * /rosdistro: noetic * /rosversion: 1.15.15 * /rtabmap/rgbd_odometry/approx_sync: True * /rtabmap/rgbd_odometry/approx_sync_max_interval: 0.0 * /rtabmap/rgbd_odometry/config_path: * /rtabmap/rgbd_odometry/expected_update_rate: 0.0 * /rtabmap/rgbd_odometry/frame_id: camera_link * /rtabmap/rgbd_odometry/ground_truth_base_frame_id: * /rtabmap/rgbd_odometry/ground_truth_frame_id: * /rtabmap/rgbd_odometry/guess_frame_id: * /rtabmap/rgbd_odometry/guess_min_rotation: 0.0 * /rtabmap/rgbd_odometry/guess_min_translation: 0.0 * /rtabmap/rgbd_odometry/keep_color: False * /rtabmap/rgbd_odometry/max_update_rate: 0.0 * /rtabmap/rgbd_odometry/odom_frame_id: odom * /rtabmap/rgbd_odometry/publish_tf: True * /rtabmap/rgbd_odometry/queue_size: 10 * /rtabmap/rgbd_odometry/subscribe_rgbd: False * /rtabmap/rgbd_odometry/wait_for_transform_duration: 0.2 * /rtabmap/rgbd_odometry/wait_imu_to_init: False * /rtabmap/rtabmap/Mem/IncrementalMemory: true * /rtabmap/rtabmap/Mem/InitWMWithAllNodes: false * /rtabmap/rtabmap/approx_sync: True * /rtabmap/rtabmap/config_path: * /rtabmap/rtabmap/database_path: ~/.ros/rtabmap.db * /rtabmap/rtabmap/frame_id: camera_link * /rtabmap/rtabmap/gen_depth: False * /rtabmap/rtabmap/gen_depth_decimation: 1 * /rtabmap/rtabmap/gen_depth_fill_holes_error: 0.1 * /rtabmap/rtabmap/gen_depth_fill_holes_size: 0 * /rtabmap/rtabmap/gen_depth_fill_iterations: 1 * /rtabmap/rtabmap/gen_scan: False * /rtabmap/rtabmap/ground_truth_base_frame_id: * /rtabmap/rtabmap/ground_truth_frame_id: * /rtabmap/rtabmap/initial_pose: * /rtabmap/rtabmap/landmark_angular_variance: 9999.0 * /rtabmap/rtabmap/landmark_linear_variance: 0.0001 * /rtabmap/rtabmap/map_frame_id: map * /rtabmap/rtabmap/odom_frame_id: * /rtabmap/rtabmap/odom_frame_id_init: * /rtabmap/rtabmap/odom_sensor_sync: False * /rtabmap/rtabmap/odom_tf_angular_variance: 0.001 * /rtabmap/rtabmap/odom_tf_linear_variance: 0.001 * /rtabmap/rtabmap/publish_tf: True * /rtabmap/rtabmap/queue_size: 10 * /rtabmap/rtabmap/scan_cloud_max_points: 0 * /rtabmap/rtabmap/subscribe_depth: True * /rtabmap/rtabmap/subscribe_odom_info: True * /rtabmap/rtabmap/subscribe_rgb: True * /rtabmap/rtabmap/subscribe_rgbd: False * /rtabmap/rtabmap/subscribe_scan: False * /rtabmap/rtabmap/subscribe_scan_cloud: False * /rtabmap/rtabmap/subscribe_scan_descriptor: False * /rtabmap/rtabmap/subscribe_stereo: False * /rtabmap/rtabmap/subscribe_user_data: False * /rtabmap/rtabmap/wait_for_transform_duration: 0.2 * /rtabmap/rtabmapviz/approx_sync: True * /rtabmap/rtabmapviz/frame_id: camera_link * /rtabmap/rtabmapviz/odom_frame_id: * /rtabmap/rtabmapviz/queue_size: 10 * /rtabmap/rtabmapviz/subscribe_depth: True * /rtabmap/rtabmapviz/subscribe_odom_info: True * /rtabmap/rtabmapviz/subscribe_rgb: True * /rtabmap/rtabmapviz/subscribe_rgbd: False * /rtabmap/rtabmapviz/subscribe_scan: False * /rtabmap/rtabmapviz/subscribe_scan_cloud: False * /rtabmap/rtabmapviz/subscribe_scan_descriptor: False * /rtabmap/rtabmapviz/subscribe_stereo: False * /rtabmap/rtabmapviz/wait_for_transform_duration: 0.2 NODES /rtabmap/ rgbd_odometry (rtabmap_ros/rgbd_odometry) rtabmap (rtabmap_ros/rtabmap) rtabmapviz (rtabmap_ros/rtabmapviz) ROS_MASTER_URI=http://localhost:11311 WARNING: Package name "Open3d" does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes. process[rtabmap/rgbd_odometry-1]: started with pid [4272] process[rtabmap/rtabmap-2]: started with pid [4273] process[rtabmap/rtabmapviz-3]: started with pid [4274] [ INFO] [1678091585.065766761]: Starting node... [ INFO] [1678091585.093054830]: Initializing nodelet with 6 worker threads. [ INFO] [1678091585.096164012]: Initializing nodelet with 6 worker threads. [ INFO] [1678091585.207038896]: Odometry: frame_id = camera_link [ INFO] [1678091585.207063932]: Odometry: odom_frame_id = odom [ INFO] [1678091585.207072779]: Odometry: publish_tf = true [ INFO] [1678091585.207079792]: Odometry: wait_for_transform = true [ INFO] [1678091585.207094950]: Odometry: wait_for_transform_duration = 0.200000 [ INFO] [1678091585.207102274]: Odometry: log_to_rosout_level = 4 [ INFO] [1678091585.207123613]: Odometry: initial_pose = xyz=0.000000,0.000000,0.000000 rpy=0.000000,-0.000000,0.000000 [ INFO] [1678091585.207134664]: Odometry: ground_truth_frame_id = [ INFO] [1678091585.207142058]: Odometry: ground_truth_base_frame_id = [ INFO] [1678091585.207149592]: Odometry: config_path = [ INFO] [1678091585.207157567]: Odometry: publish_null_when_lost = true [ INFO] [1678091585.207167485]: Odometry: guess_frame_id = [ INFO] [1678091585.207176692]: Odometry: guess_min_translation = 0.000000 [ INFO] [1678091585.207195858]: Odometry: guess_min_rotation = 0.000000 [ INFO] [1678091585.207204043]: Odometry: guess_min_time = 0.000000 [ INFO] [1678091585.207212309]: Odometry: expected_update_rate = 0.000000 Hz [ INFO] [1678091585.207219682]: Odometry: max_update_rate = 0.000000 Hz [ INFO] [1678091585.207227417]: Odometry: min_update_rate = 0.000000 Hz [ INFO] [1678091585.207234770]: Odometry: wait_imu_to_init = false [ INFO] [1678091585.207257262]: Odometry: stereoParams_=0 visParams_=1 icpParams_=0 [ INFO] [1678091585.216213178]: Starting node... [ INFO] [1678091585.296312645]: /rtabmap/rtabmap(maps): map_filter_radius = 0.000000 [ INFO] [1678091585.296360244]: /rtabmap/rtabmap(maps): map_filter_angle = 30.000000 [ INFO] [1678091585.296381554]: /rtabmap/rtabmap(maps): map_cleanup = true [ INFO] [1678091585.296401561]: /rtabmap/rtabmap(maps): map_always_update = false [ INFO] [1678091585.296421137]: /rtabmap/rtabmap(maps): map_empty_ray_tracing = true [ INFO] [1678091585.296440674]: /rtabmap/rtabmap(maps): cloud_output_voxelized = true [ INFO] [1678091585.296463366]: /rtabmap/rtabmap(maps): cloud_subtract_filtering = false [ INFO] [1678091585.296484726]: /rtabmap/rtabmap(maps): cloud_subtract_filtering_min_neighbors = 2 [ INFO] [1678091585.296941757]: /rtabmap/rtabmap(maps): octomap_tree_depth = 16 [ INFO] [1678091585.326203293]: rtabmap: frame_id = camera_link [ INFO] [1678091585.326256051]: rtabmap: map_frame_id = map [ INFO] [1678091585.326288271]: rtabmap: log_to_rosout_level = 4 [ INFO] [1678091585.326318497]: rtabmap: initial_pose = [ INFO] [1678091585.326348042]: rtabmap: use_action_for_goal = false [ INFO] [1678091585.326381505]: rtabmap: tf_delay = 0.050000 [ INFO] [1678091585.326411671]: rtabmap: tf_tolerance = 0.100000 [ INFO] [1678091585.326440985]: rtabmap: odom_sensor_sync = false [ INFO] [1678091585.327069546]: rtabmap: gen_scan = false [ INFO] [1678091585.327103119]: rtabmap: gen_depth = false [ INFO] [1678091585.516731202]: Setting RTAB-Map parameter "Mem/IncrementalMemory"="true" [ INFO] [1678091585.517157286]: Setting RTAB-Map parameter "Mem/InitWMWithAllNodes"="false" [ INFO] [1678091585.561533981]: RGBDOdometry: approx_sync = true [ INFO] [1678091585.561567664]: RGBDOdometry: approx_sync_max_interval = 0.000000 [ INFO] [1678091585.561583964]: RGBDOdometry: queue_size = 10 [ INFO] [1678091585.561629329]: RGBDOdometry: subscribe_rgbd = false [ INFO] [1678091585.561642433]: RGBDOdometry: rgbd_cameras = 1 [ INFO] [1678091585.561668892]: RGBDOdometry: keep_color = false [ INFO] [1678091585.579452784]: /rtabmap/rgbd_odometry subscribed to (approx sync): /device_0/sensor_1/Color_0/image/data \ /device_0/sensor_0/Depth_0/image/data \ /device_0/sensor_1/Color_0/info/camera_info [ INFO] [1678091585.726252186]: RTAB-Map detection rate = 1.000000 Hz [ INFO] [1678091585.727117128]: rtabmap: Deleted database "/home/minsoo/.ros/rtabmap.db" (--delete_db_on_start or -d are set). [ INFO] [1678091585.727148636]: rtabmap: Using database from "/home/minsoo/.ros/rtabmap.db" (0 MB). [ INFO] [1678091585.877683127]: rtabmap: Database version = "0.21.0". [ INFO] [1678091585.877731167]: rtabmap: SLAM mode (Mem/IncrementalMemory=true) [ INFO] [1678091585.898476265]: /rtabmap/rtabmap: subscribe_depth = true [ INFO] [1678091585.898505680]: /rtabmap/rtabmap: subscribe_rgb = true [ INFO] [1678091585.898524074]: /rtabmap/rtabmap: subscribe_stereo = false [ INFO] [1678091585.898536337]: /rtabmap/rtabmap: subscribe_rgbd = false (rgbd_cameras=1) [ INFO] [1678091585.898552998]: /rtabmap/rtabmap: subscribe_odom_info = true [ INFO] [1678091585.898568527]: /rtabmap/rtabmap: subscribe_user_data = false [ INFO] [1678091585.898583285]: /rtabmap/rtabmap: subscribe_scan = false [ INFO] [1678091585.898597100]: /rtabmap/rtabmap: subscribe_scan_cloud = false [ INFO] [1678091585.898610926]: /rtabmap/rtabmap: subscribe_scan_descriptor = false [ INFO] [1678091585.898624532]: /rtabmap/rtabmap: queue_size = 10 [ INFO] [1678091585.898637586]: /rtabmap/rtabmap: approx_sync = true [ INFO] [1678091585.898667001]: Setup depth callback [ INFO] [1678091586.211765764]: rtabmapviz: Using configuration from "/home/minsoo/.ros/rtabmap_gui.ini" [ INFO] [1678091586.216750982]: /rtabmap/rtabmap subscribed to (approx sync): /rtabmap/odom \ /device_0/sensor_1/Color_0/image/data \ /device_0/sensor_0/Depth_0/image/data \ /device_0/sensor_1/Color_0/info/camera_info \ /rtabmap/odom_info [ INFO] [1678091586.291254258]: rtabmap 0.21.0 started... libpng warning: iCCP: known incorrect sRGB profile libpng warning: iCCP: known incorrect sRGB profile libpng warning: iCCP: known incorrect sRGB profile [ INFO] [1678091587.113770950]: rtabmapviz: Reading parameters from the ROS server... [ INFO] [1678091587.253577498]: rtabmapviz: Parameters read = 359 [ INFO] [1678091587.253605310]: rtabmapviz: Parameters successfully read. [ INFO] [1678091587.795726534]: /rtabmap/rtabmapviz: subscribe_depth = true [ INFO] [1678091587.795759866]: /rtabmap/rtabmapviz: subscribe_rgb = true [ INFO] [1678091587.795774724]: /rtabmap/rtabmapviz: subscribe_stereo = false [ INFO] [1678091587.795792718]: /rtabmap/rtabmapviz: subscribe_rgbd = false (rgbd_cameras=1) [ INFO] [1678091587.795806994]: /rtabmap/rtabmapviz: subscribe_odom_info = true [ INFO] [1678091587.795820760]: /rtabmap/rtabmapviz: subscribe_user_data = false [ INFO] [1678091587.795833744]: /rtabmap/rtabmapviz: subscribe_scan = false [ INFO] [1678091587.795846017]: /rtabmap/rtabmapviz: subscribe_scan_cloud = false [ INFO] [1678091587.795858871]: /rtabmap/rtabmapviz: subscribe_scan_descriptor = false [ INFO] [1678091587.795871955]: /rtabmap/rtabmapviz: queue_size = 10 [ INFO] [1678091587.795885460]: /rtabmap/rtabmapviz: approx_sync = true [ INFO] [1678091587.795911910]: Setup depth callback [ INFO] [1678091587.852878706]: /rtabmap/rtabmapviz subscribed to (approx sync): /rtabmap/odom \ /device_0/sensor_1/Color_0/image/data \ /device_0/sensor_0/Depth_0/image/data \ /device_0/sensor_1/Color_0/info/camera_info \ /rtabmap/odom_info [ INFO] [1678091587.852990815]: rtabmapviz started. [ WARN] [1678091590.579718116]: /rtabmap/rgbd_odometry: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. /rtabmap/rgbd_odometry subscribed to (approx sync): /device_0/sensor_1/Color_0/image/data \ /device_0/sensor_0/Depth_0/image/data \ /device_0/sensor_1/Color_0/info/camera_info [ WARN] [1678091591.216985819]: /rtabmap/rtabmap: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). If topics are not published at the same rate, you could increase "queue_size" parameter (current=10). /rtabmap/rtabmap subscribed to (approx sync): /rtabmap/odom \ /device_0/sensor_1/Color_0/image/data \ /device_0/sensor_0/Depth_0/image/data \ /device_0/sensor_1/Color_0/info/camera_info \ /rtabmap/odom_info [ WARN] [1678091592.853013886]: /rtabmap/rtabmapviz: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). If topics are not published at the same rate, you could increase "queue_size" parameter (current=10). /rtabmap/rtabmapviz subscribed to (approx sync): /rtabmap/odom \ /device_0/sensor_1/Color_0/image/data \ /device_0/sensor_0/Depth_0/image/data \ /device_0/sensor_1/Color_0/info/camera_info \ /rtabmap/odom_info ########################################### When running the bag file, the command is: rosbag play 22.bag --clock ########################################### As a result of checking with "rosbag echo" when bag is executed, it came out like the picture below.  Even though bag was running, there was only that message. ########################################### Use : rostopic hz /rtabmap/odom /device_0/sensor_1/Color_0/image/data /device_0/sensor_0/Depth_0/image/data /device_0/sensor_1/Color_0/info/camera_info /rtabmap/odom_info 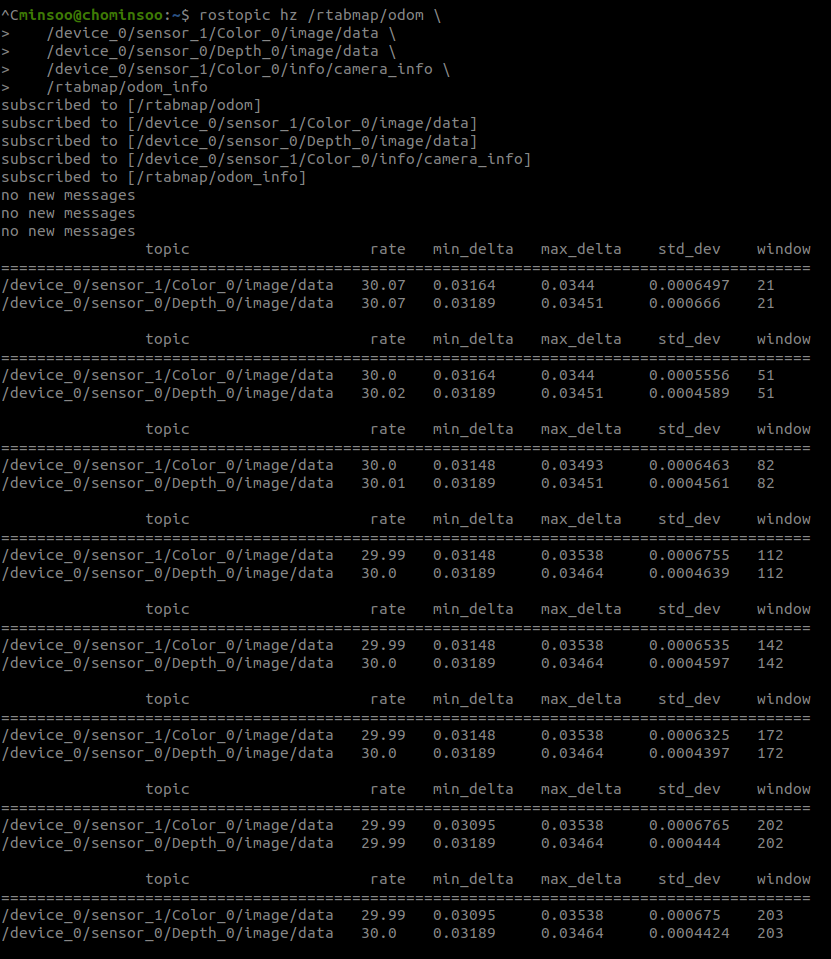
|
|
Administrator
|
You need to either record a new bag where the camera info is published at same frame rate than color image, or make a node to republish your camera info from the bag accordingly to image topics (a node subscribing to bag camera info to get the first camera topic, then another subscriber to color image data to republish the camera info topic with same header than the image topic).
|
|
|
So, is this bag itself impossible? Thank you for your kind reply!!! Thank you again!
|
«
Return to Official RTAB-Map Forum
|
1 view|%1 views
| Free forum by Nabble | Edit this page |