Hello, thank you for reply.
Sadly, I think I had right network configuration(since it worked well before).
It were all same as you wrote.
So I formatted my computer and re installed it. (Workstation)
I updated apt-get and did $ sudo apt-get install ros-indigo-turtlebot-bringup ros-indigo-turtlebot-navigation ros-indigo-rtabmap-ros
as written here
http://wiki.ros.org/rtabmap_ros/Tutorials/MappingAndNavigationOnTurtlebotUnfortunately downloading map failure still occured.
So I also updated apt-get of Turtlebot and installed same things as above.
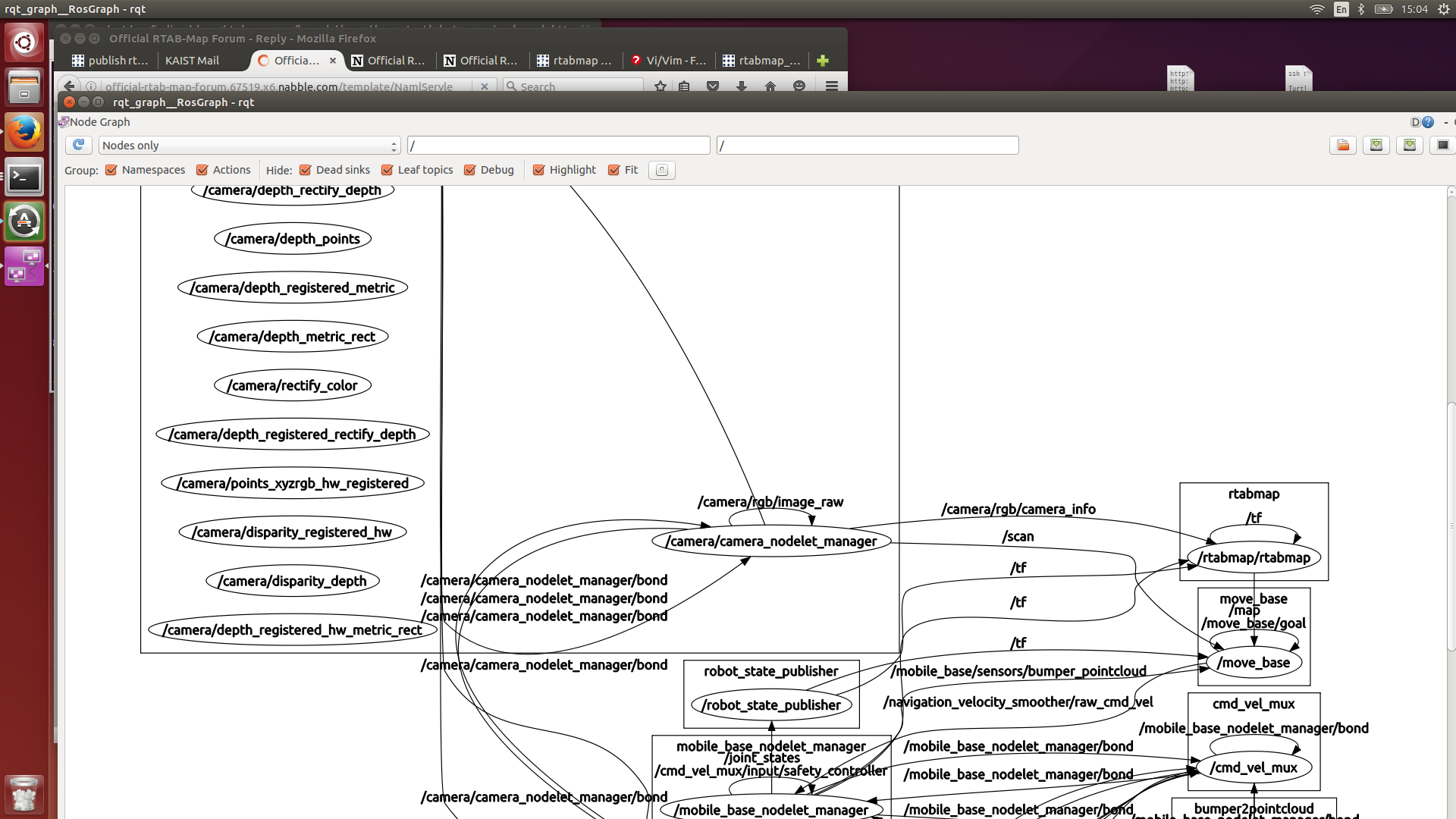
Now I get this error when beginning mapping.launch file at Turtlebot.
[rtabmap/rtabmap-19] process has died [pid 19049, exit code 127, cmd /opt/ros/indigo/lib/rtabmap_ros/rtabmap --delete_db_on_start scan:=/scan rgb/image:=/camera/rgb/image_rect_color depth/image:=/camera/depth_registered/image_raw rgb/camera_info:=/camera/rgb/camera_info grid_map:=/map __name:=rtabmap __log:=/home/ubuntu/.ros/log/d79dcaee-25cd-11e6-9157-742f68e0ff10/rtabmap-rtabmap-19.log].
log file: /home/ubuntu/.ros/log/d79dcaee-25cd-11e6-9157-742f68e0ff10/rtabmap-rtabmap-19*.log
I found same issue and your reply, but this case when I try to run $rtabmap at Turtlebot, it says
'cannot connect to X server'.
What should I do??