Hello,
I have been dealing with this following issue where I cannot export 3D clouds from RTABMap.
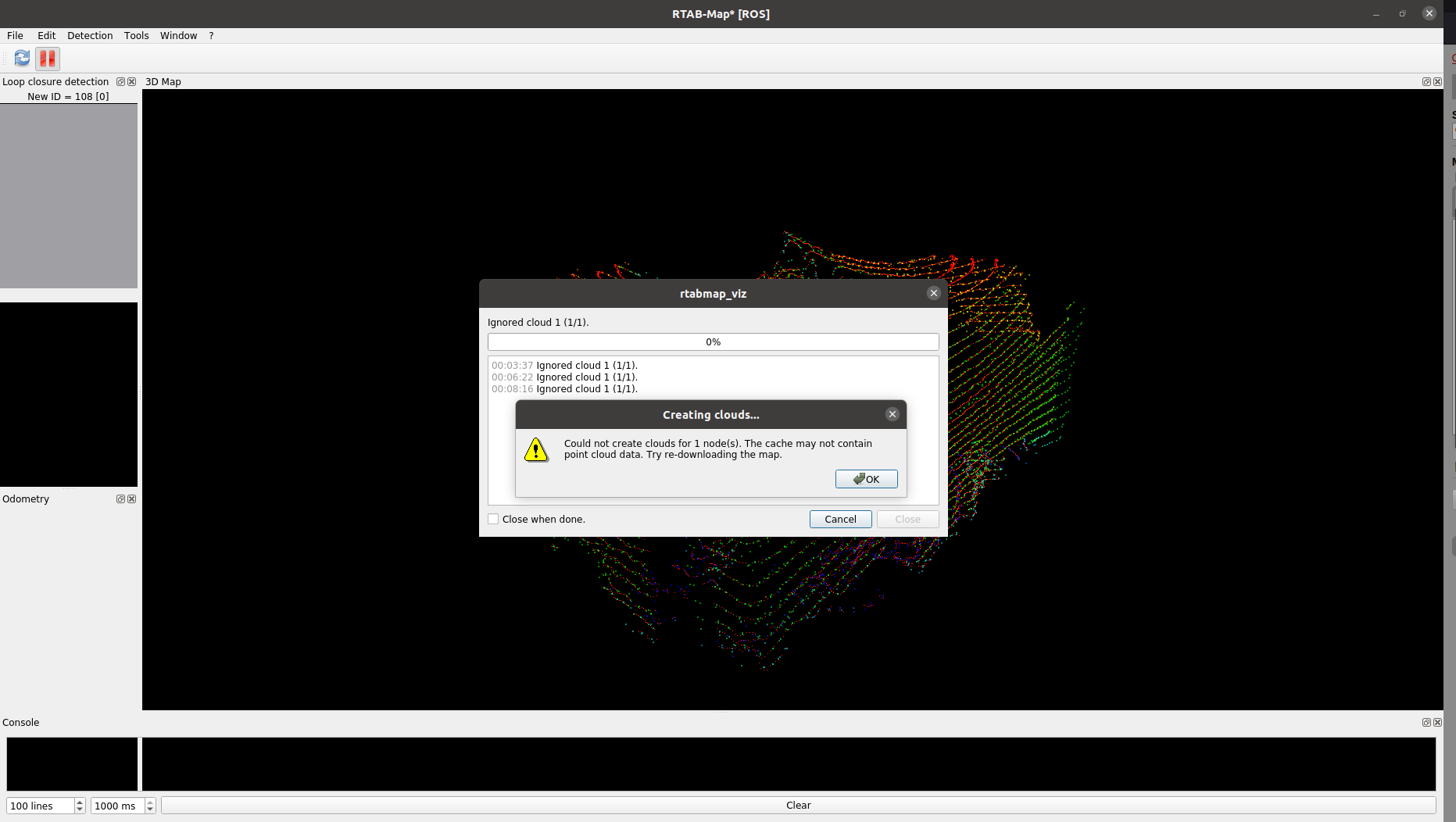
Here is the terminal output that is running RTABMap
[ INFO] [1690329973.345993549]: Odom: ratio=0.876090, std dev=0.007689m|0.002431rad, update time=0.011594s
[ INFO] [1690329973.392727245]: Odom: ratio=0.880222, std dev=0.007784m|0.002462rad, update time=0.011303s
[ INFO] [1690329973.445551305]: Odom: ratio=0.881715, std dev=0.007629m|0.002412rad, update time=0.014600s
[ INFO] [1690329973.494272262]: Odom: ratio=0.878836, std dev=0.007614m|0.002408rad, update time=0.009736s
[ INFO] [1690329973.524607379]: Odometry: paused!
[ INFO] [1690329973.526700241]: rtabmap: paused!
[ INFO] [1690329976.274598693]: rtabmap: Getting map (global=false optimized=true graphOnly=false)...
[ WARN] (2023-07-26 00:06:22.969) SensorData.cpp:725::uncompressDataConst() Requested raw image data, but the sensor data (1) doesn't have image.
[ WARN] (2023-07-26 00:06:22.969) SensorData.cpp:740::uncompressDataConst() Requested depth/right image data, but the sensor data (1) doesn't have depth/right image.
[ERROR] (2023-07-26 00:06:22.969) ExportCloudsDialog.cpp:3750::getClouds() Cloud 1 not found in cache!
[ WARN] (2023-07-26 00:08:16.571) SensorData.cpp:725::uncompressDataConst() Requested raw image data, but the sensor data (1) doesn't have image.
[ WARN] (2023-07-26 00:08:16.571) SensorData.cpp:740::uncompressDataConst() Requested depth/right image data, but the sensor data (1) doesn't have depth/right image.
[ERROR] (2023-07-26 00:08:16.571) ExportCloudsDialog.cpp:3750::getClouds() Cloud 1 not found in cache!
Here attached is my launch file that I am using to run RTABMap with the Ouster OS-0 sensor and a MTK3339 GPS. This is modified from the example test_ouster_gen2.launch file.
230724_ouster_rtabmap_gps.launchI am running these within a docker container, as described in the attached dockerfile.
dockerfile_rtabmap_ouster_gps.dockerfile_rtabmap_ouster_gpsPlease let me know what I can do to resolve these issues or if I need to provide more information.
Thank you!
Jay


