Hi Chao,
Not sure what is the problem as the demo is working here:
~/rtabmap/bin/rtabmap-noEventsExample 20 2 10 ~/Downloads/stereo_20Hz stereo_20Hz ~/Downloads/stereo_20Hz/left ~/Downloads/stereo_20Hz/right
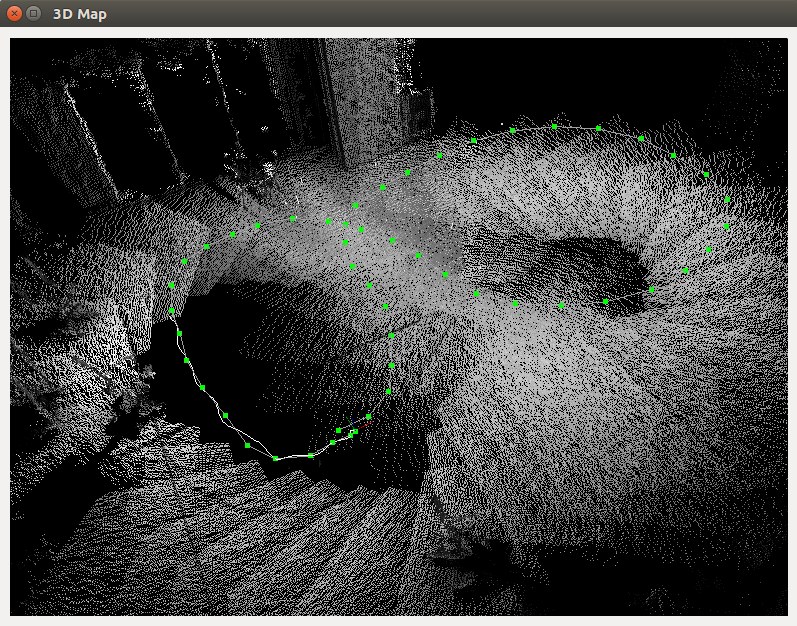
When RGBD/Enabled is disabled, only loop closure detection is done. For this example, this parameter should be true to create a 3D map.
On your system, the odometry seems returning null, like it is not able to compute motion estimation. Do you have other warnings or errors in the console? Set log level
here to Debug to see more info.
cheers,
Mathieu

