Hi Mathieu,
Sorry, that's my fault of reading

.
Here is the database I got for your reference.
https://drive.google.com/open?id=1wdTe5IIvA5QwG4S6VX9NWndpT3xS_ZAx
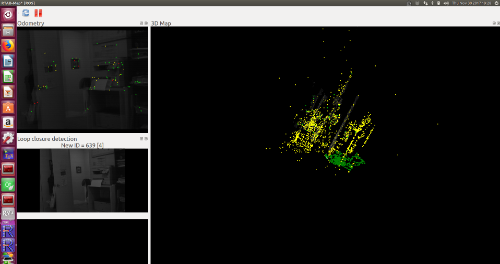
In following screenshot, it only shows the latest feature points and point clouds reprojected into 3D map on my computer. The point clouds before the current timestamped were wiped out when the new images feeded. So the 3D map is not retained all the historical point clouds as the result when I ran the demo_stereo_outdoor.launch and the example bag file.
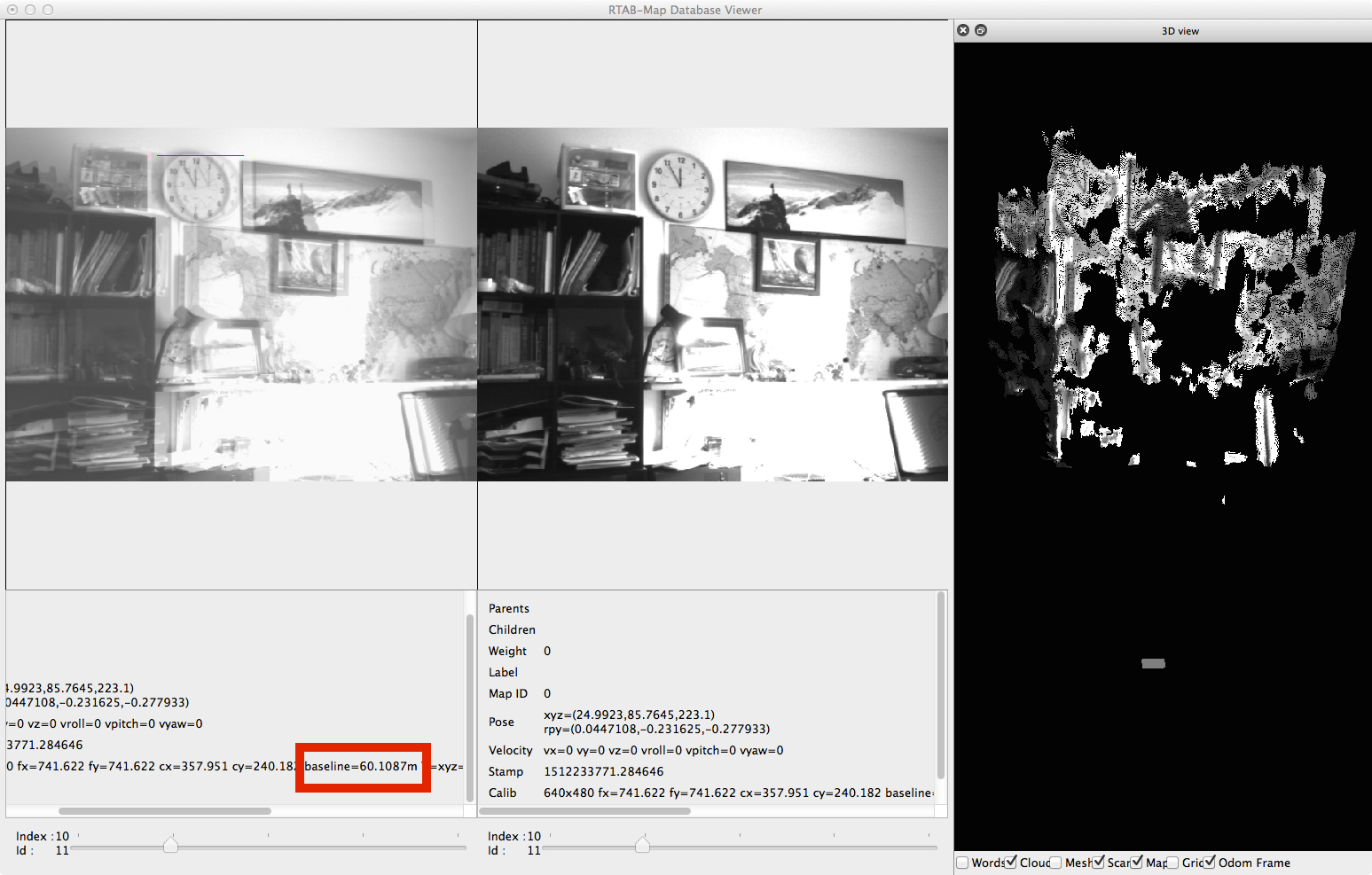
Here are the other settings regarding my Tara stereo camera.
Main launch file:
stereo_mapping2.launch.
I changed "/left/image_rect_color" to "/left/image_rect".
stereo_image_proc launch file:
tara.launch.
rviz:
rgbd_tara.rvizgui.ini:
rgbd_gui_tara.iniThe frame id of the left camera published is "cameraLeft".
My current goal is to get octomap from stereo camera for the path planning.
Rtabmap is a great mapping platform. Thank you all contributors.
cheers,
Jason


 so 2 cameras for 2 approaches seems a good way to go
so 2 cameras for 2 approaches seems a good way to go