Close Loop cause Map to Disappear


|
Ok, im using ROS Hydro. How ever I am having difficulties in getting it to work under a close loop. Whenever it detected a loop it just delete the cloud map.
here is my stereo outdoor demo modified launch file. launch>
<!-- Rotate the camera frame. -->
<arg name="pi/2" value="1.5707963267948966" />
<arg name="camdist" value ="0.1397" />
<arg name="optical_rotate" value="0.3 0 0 -$(arg pi/2) 0 -$(arg pi/2)" />
<node pkg="tf" type="static_transform_publisher" name="camera_base_link"
args="$(arg optical_rotate) base_link stereo_camera 100" />
<!-- Run the ROS package stereo_image_proc -->
<group ns="/stereo_camera" >
<!-- Odometry -->
<node pkg="rtabmap_ros" type="stereo_odometry" name="stereo_odometry" output="screen">
<remap from="left/image_rect" to="left/image_rect"/>
<remap from="right/image_rect" to="right/image_rect"/>
<remap from="left/camera_info" to="left/camera_info"/>
<remap from="right/camera_info" to="right/camera_info"/>
<remap from="odom" to="/stereo_camera/odom"/> <!-- addd -->
<param name="frame_id" type="string" value="base_link"/>
<param name="odom_frame_id" type="string" value="odom"/>
<param name="approx_sync" type="bool" value="false"/>
<param name="queue_size" type="int" value="5"/>
<param name="Odom/InlierDistance" type="string" value="0.1"/>
<param name="Odom/MinInliers" type="string" value="10"/>
<param name="Odom/RoiRatios" type="string" value="0.03 0.03 0.04 0.04"/>
<param name="Odom/MaxDepth" type="string" value="10"/>
<param name="OdomBow/NNDR" type="string" value="0.8"/> <!--addd -->
<param name="Odom/FillInfoData" type="string" value="true"/> <!-- - addd -->
<param name="GFTT/MaxCorners" type="string" value="500"/>
<param name="GFTT/MinDistance" type="string" value="5"/>
</node>
</group>
<group ns="rtabmap">
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="--delete_db_on_start">
<param name="frame_id" type="string" value="base_link"/>
<param name="subscribe_stereo" type="bool" value="true"/>
<param name="subscribe_depth" type="bool" value="true"/>
<param name="wait_for_transform" type="bool" value="true"/> <!--added-->
<remap from="left/image_rect" to="/stereo_camera/left/image_rect_color"/>
<remap from="right/image_rect" to="/stereo_camera/right/image_rect"/>
<remap from="left/camera_info" to="/stereo_camera/left/camera_info"/>
<remap from="right/camera_info" to="/stereo_camera/right/camera_info"/>
<remap from="odom" to="/stereo_camera/odom"/>
<param name="queue_size" type="int" value="30"/>
<!-- RTAB-Map's parameters -->
<param name="Rtabmap/TimeThr" type="string" value="700"/>
<param name="Rtabmap/DetectionRate" type="string" value="0"/>
<param name="Kp/WordsPerImage" type="string" value="200"/>
<param name="Kp/RoiRatios" type="string" value="0.03 0.03 0.04 0.04"/>
<param name="Kp/DetectorStrategy" type="string" value="0"/> <!-- use SURF -->
<param name="Kp/NNStrategy" type="string" value="1"/> <!-- kdTree -->
<param name="SURF/HessianThreshold" type="string" value="1000"/>
<param name="LccBow/MaxDepth" type="string" value="5"/> <!--5 -->
<param name="LccBow/MinInliers" type="string" value="10"/>
<param name="LccBow/InlierDistance" type="string" value="0.02"/> <!--0.02 -->
<param name="LccReextract/Activated" type="string" value="true"/>
<param name="LccReextract/MaxWords" type="string" value="500"/>
<!-- Disable graph optimization because we use map_optimizer node below -->
<param name="RGBD/ToroIterations" type="string" value="0"/>
<param name="RGBD/OptimizeStrategy" type="string" value="2"/> <!-- g2o=1, GTSAM=2 -->
<param name="RGBD/OptimizeRobust" type="string" value="true"/>
<param name="RGBD/LocalLoopDetectionSpace" type="string" value="true"/> <!-- Local loop closure detection (using estimated position) with locations in WM -->
<param name="RGBD/LocalLoopDetectionTime" type="string" value="false"/> <!-- Local loop closure detection with locations in STM -->
</node>
<node pkg="rtabmap_ros" type="map_optimizer" name="map_optimizer"/>
<node pkg="rtabmap_ros" type="map_assembler" name="map_assembler">
<param name="occupancy_grid" type="bool" value="false"/>
<remap from="mapData" to="mapData_optimized"/>
<remap from="grid_projection_map" to="/map"/>
</node>
<!-- Visualisation RTAB-Map -->
<node pkg="rtabmap_ros" type="rtabmapviz" name="rtabmapviz" args="-d $(find rtabmap_ros)/launch/config/rgbd_gui.ini" output="screen">
<param name="subscribe_stereo" type="bool" value="true"/>
<param name="subscribe_odom_info" type="bool" value="true"/>
<param name="queue_size" type="int" value="10"/>
<param name="frame_id" type="string" value="base_link"/>
<remap from="left/image_rect" to="/stereo_camera/left/image_rect_color"/>
<remap from="right/image_rect" to="/stereo_camera/right/image_rect"/>
<remap from="left/camera_info" to="/stereo_camera/left/camera_info"/>
<remap from="right/camera_info" to="/stereo_camera/right/camera_info"/>
<remap from="odom_info" to="/stereo_camera/odom_info"/>
<remap from="odom" to="/stereo_camera/odom"/>
<remap from="mapData" to="mapData_optimized"/><!-- addd -->
</node>
</group>
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find rtabmap_ros)/launch/config/demo_stereo_outdoor.rviz"/> <!-- addd -->
</launch>
|
|
|
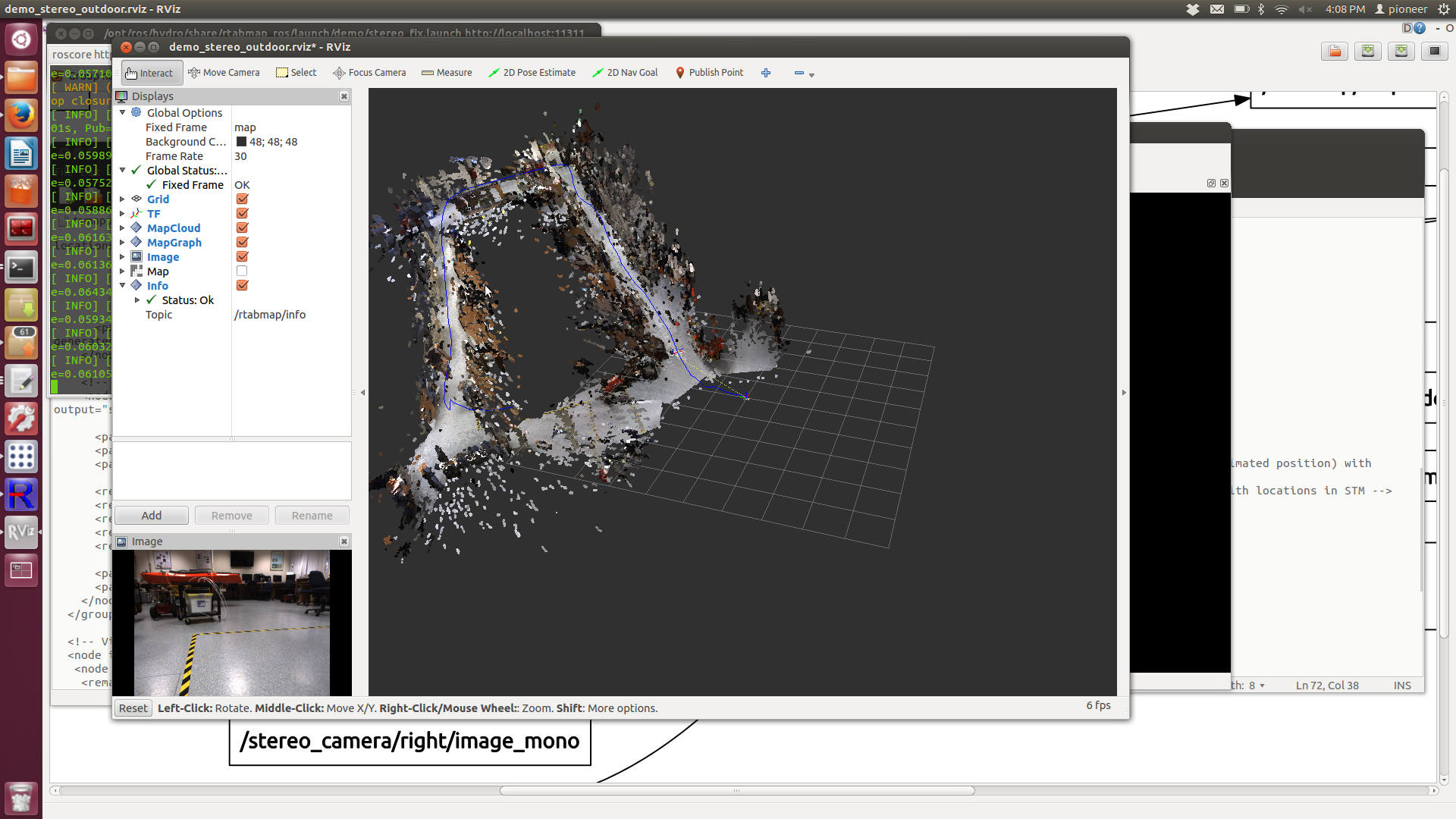 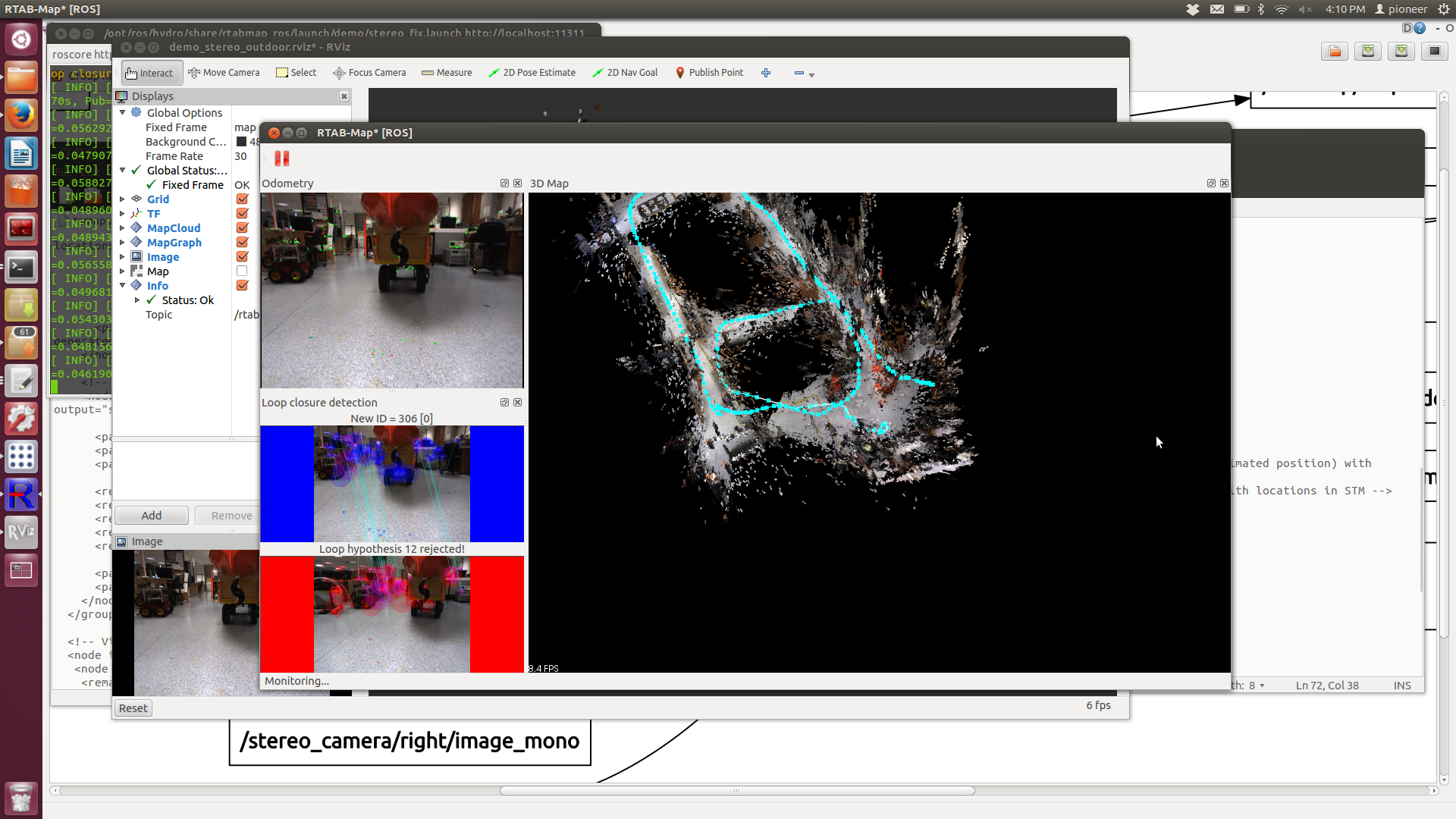 Also why is the rviz version of the map is very poorly shown compared to rtabmap where the points are more refined.?  Close loop matched, but map gone |
|
Administrator
|
Hi chainer,
The point cloud rendering parameters in RVIZ can be changed under MapCloud display's parameters in RVIZ. For rtabmapviz, the rendering parameters are in Preferences->3D Rendering. Thx for the report! There was effectively a bug in map_optimizer making it clearing the whole map. This is now fixed. However, I recommend to use graph optimization inside rtabmap node ("RGBD/OptimizeIterations=100" instead of "RGBD/ToroIterations=0"). "RGBD/LocalLoopDetectionSpace=true" requires also that graph optimization is done in rtabmap. The parameters "RGBD/OptimizeStrategy" and "RGBD/OptimizeRobust" are also ignored when optimization is disabled. I've updated the stereo outdoor mapping tutorial to not use map_optimizer node. If you want to use GTSAM, I would reduce the number of optimization iterations (RGBD/OptimizeIterations=10) as it is slower than TORO but converges faster. Also, you set "Rtabmap/DetectionRate=0" (which means there are map updates as fast as possible), this will make rtabmap to add a lot of nodes (or key frames) in the graph, increasing significantly loop closure detection time, graph optimization time and cloud reconstruction time. The default is 1 Hz as most general usages don't need to update the map faster. You may increase up to 2 Hz, but I don't recommend to increase it more. In summary, here are some modifications I would do to your launch file: <node name="rtabmap" ... <param name="Rtabmap/DetectionRate" type="string" value="1"/> <param name="RGBD/OptimizeIterations" type="string" value="10"/> <!-- 10 for GTSAM, 100 for TORO --> <param name="RGBD/OptimizeStrategy" type="string" value="2"/> <!-- TORO=0, g2o=1, GTSAM=2 --> <param name="RGBD/OptimizeRobust" type="string" value="true"/> <param name="LccBow/InlierDistance" type="string" value="0.1"/> <!-- default is now 0.1, less loop closure rejections --> </node> <!-- Remove these nodes: <node pkg="rtabmap_ros" type="map_optimizer" name="map_optimizer"/> <node pkg="rtabmap_ros" type="map_assembler" name="map_assembler"> <param name="occupancy_grid" type="bool" value="false"/> <remap from="mapData" to="mapData_optimized"/> <remap from="grid_projection_map" to="/map"/> </node> --> <node name="rtabmapviz" ... <remap from="mapData" to="mapData"/> <!-- Use mapData from rtabmap node --> </node> cheers, Mathieu |
«
Return to Official RTAB-Map Forum
|
1 view|%1 views
| Free forum by Nabble | Edit this page |