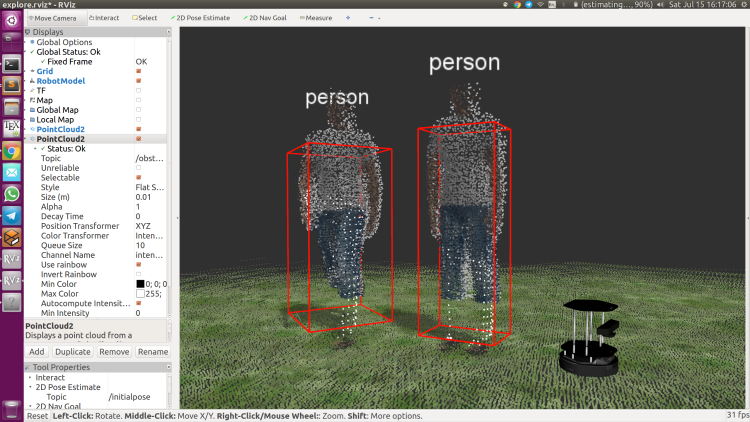
I'm having the problem that the point cloud generated by RTABMAP has a "gap" of points between the ground and a certain height (seems to be about the same as camera height). Is there a reason for this? I wasn't able to find such a parameter (using the usual "rtabmap --params").
I have attached a screenshot to show the gap. Check the mapped persons' lower legs, they're missing their feet!
As you can see by the white points in a separate point cloud, the Kinect that is used for mapping can clearly "see" this missing part!
Thanks!
Best
ibd