Hi matlabbe,
I tried to used rtabmap with the rgbd camera+odom+scan setting, but I can't get the correct cloud map.
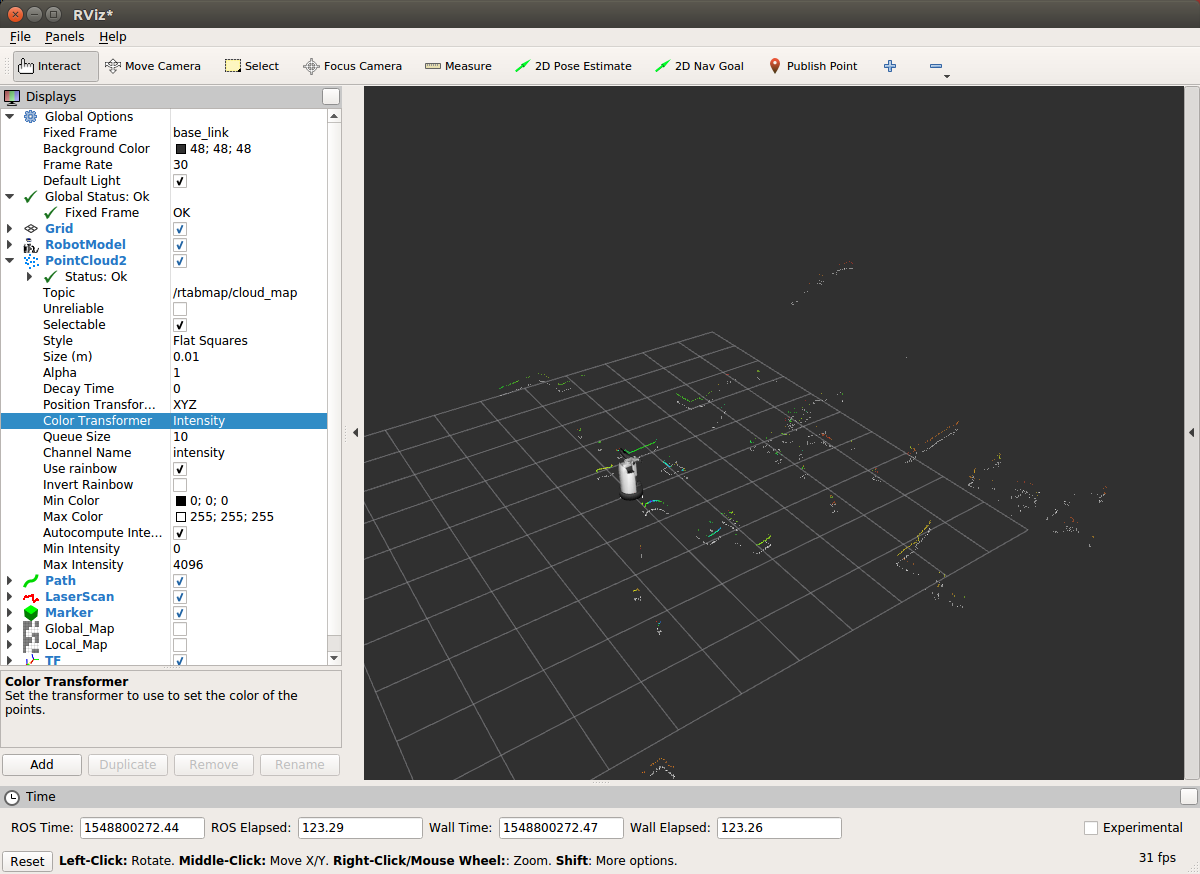
As shown in the image, the cloud map I got are only those white points on the floor, which seem to be identical to the laser scan. I can't get any points above the floor. The rgbd camera is working properly. What should I look into to get a correct cloud map? Thank you!
Here is my launch file setting:
<arg name="rviz" default="false" />
<arg name="rtabmapviz" default="false" />
<arg name="localization" default="false"/>
<arg name="rtabmapviz_cfg" default="~/.ros/rtabmap_gui.ini" />
<arg name="rviz_cfg" default="$(find rtabmap_ros)/launch/config/rgbd.rviz" />
<arg name="frame_id" default="base_link"/>
<arg name="database_path" default="~/.ros/rtabmap.db"/>
<arg name="rtabmap_args" default=""/>
<arg name="launch_prefix" default=""/>
<arg name="approx_sync" default="true"/>
<arg name="rgb_topic" default="/hsrb/head_rgbd_sensor/rgb/image_rect_color" />
<arg name="depth_registered_topic" default="/hsrb/head_rgbd_sensor/depth_registered/image_raw" />
<arg name="camera_info_topic" default="/hsrb/head_rgbd_sensor/rgb/camera_info" />
<arg name="compressed" default="false"/>
<arg name="subscribe_scan" default="true"/>
<arg name="scan_topic" default="/hsrb/base_scan"/>
<arg name="subscribe_scan_cloud" default="false"/>
<arg name="scan_cloud_topic" default="/scan_cloud"/>
<arg name="visual_odometry" default="true"/>
<arg name="odom_topic" default="/hsrb/odom"/>
<arg name="odom_frame_id" default=""/>
<arg name="namespace" default="rtabmap"/>
<arg name="wait_for_transform" default="0.2"/>