Hi,
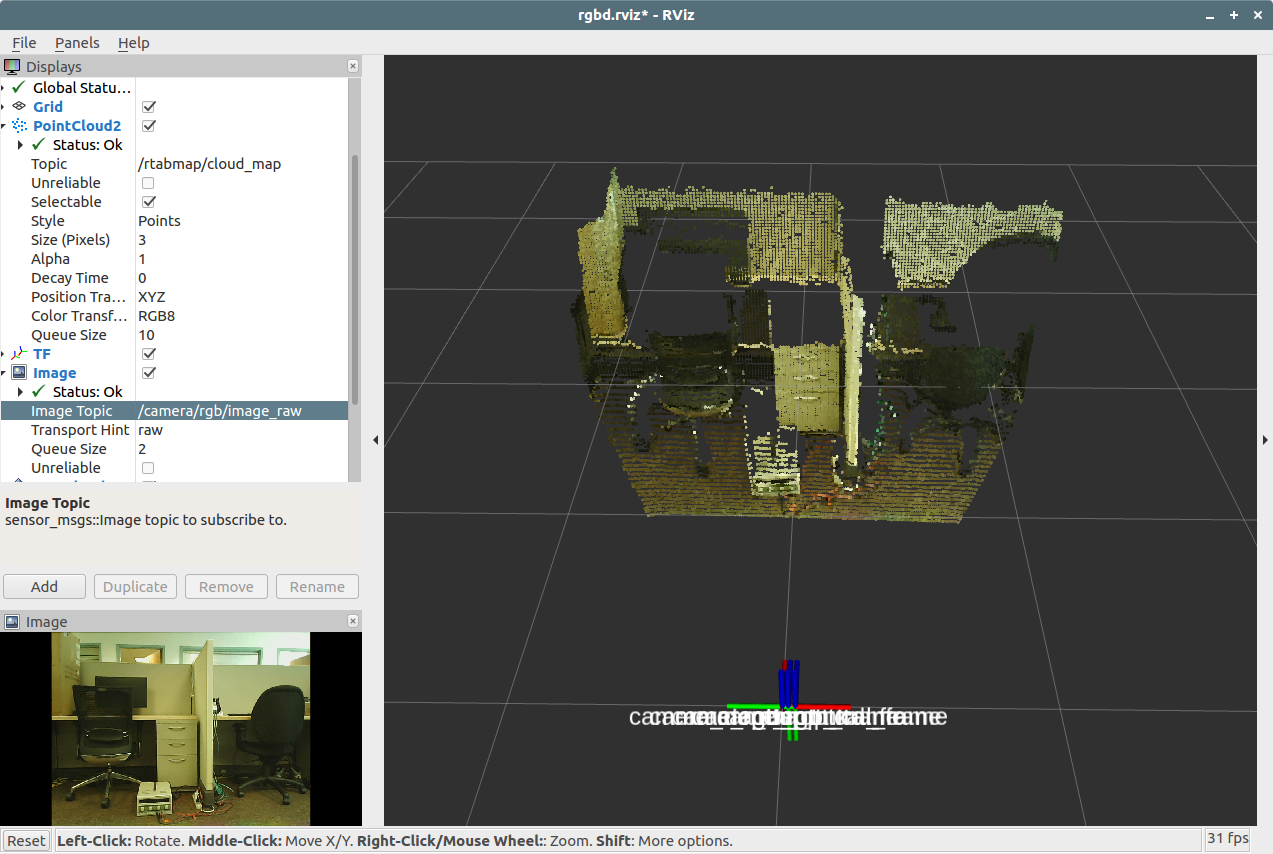
The MapCloud display seems enabled in your screenshots, which would overlap the cloud_map cloud. So it is maybe why you don't see any differences.
Using a kinect:
$ roslaunch freenect_launch freenect.launch depth_registration:=true
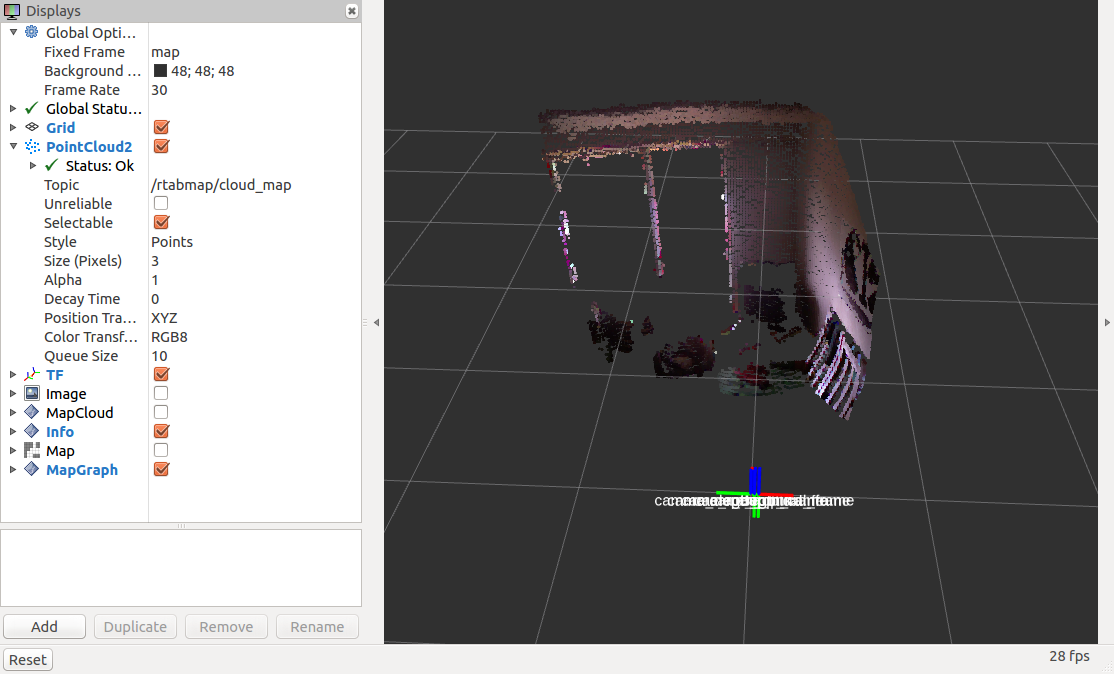
Here some examples:
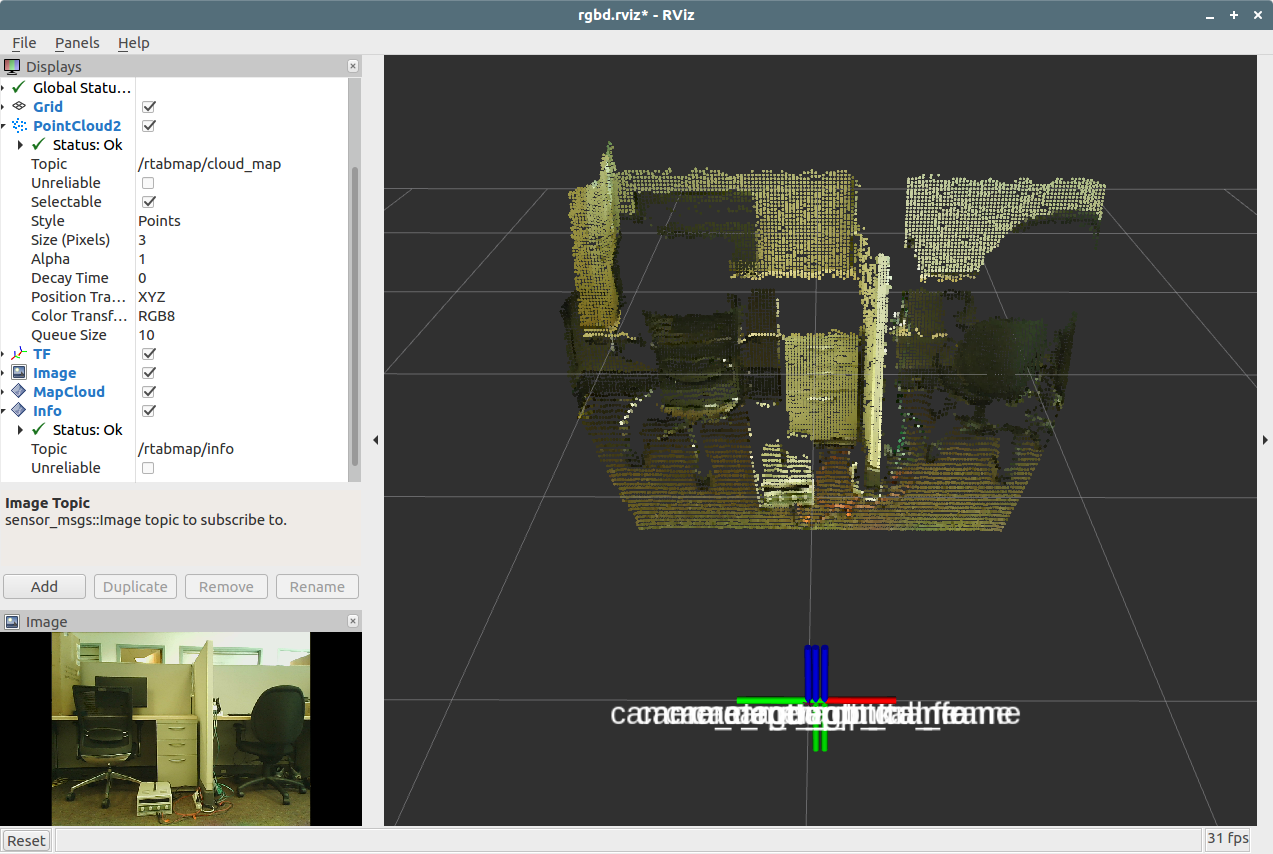
$ roslaunch rtabmap_ros rtabmap.launch args:="-d --Grid/CellSize 0.01" rtabmapviz:=false rviz:=true
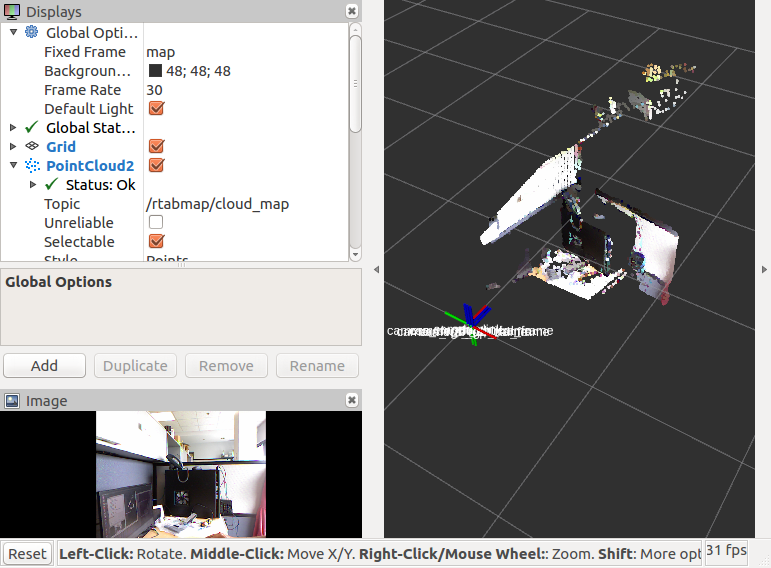
$ roslaunch rtabmap_ros rtabmap.launch args:="-d --Grid/CellSize 0.05" rtabmapviz:=false rviz:=true
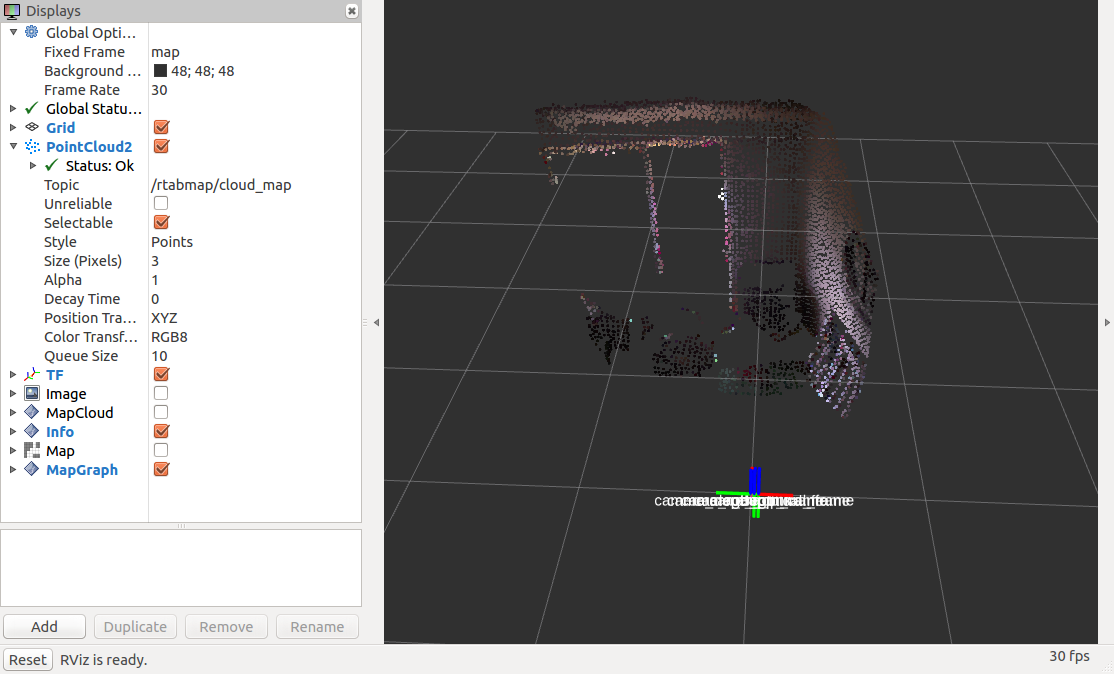
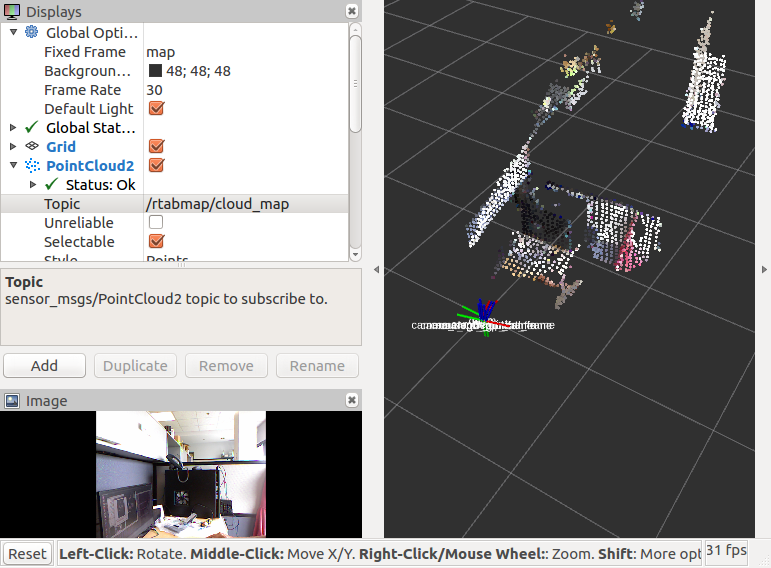
$ roslaunch rtabmap_ros rtabmap.launch args:="-d --Grid/CellSize 0.1" rtabmapviz:=false rviz:=true
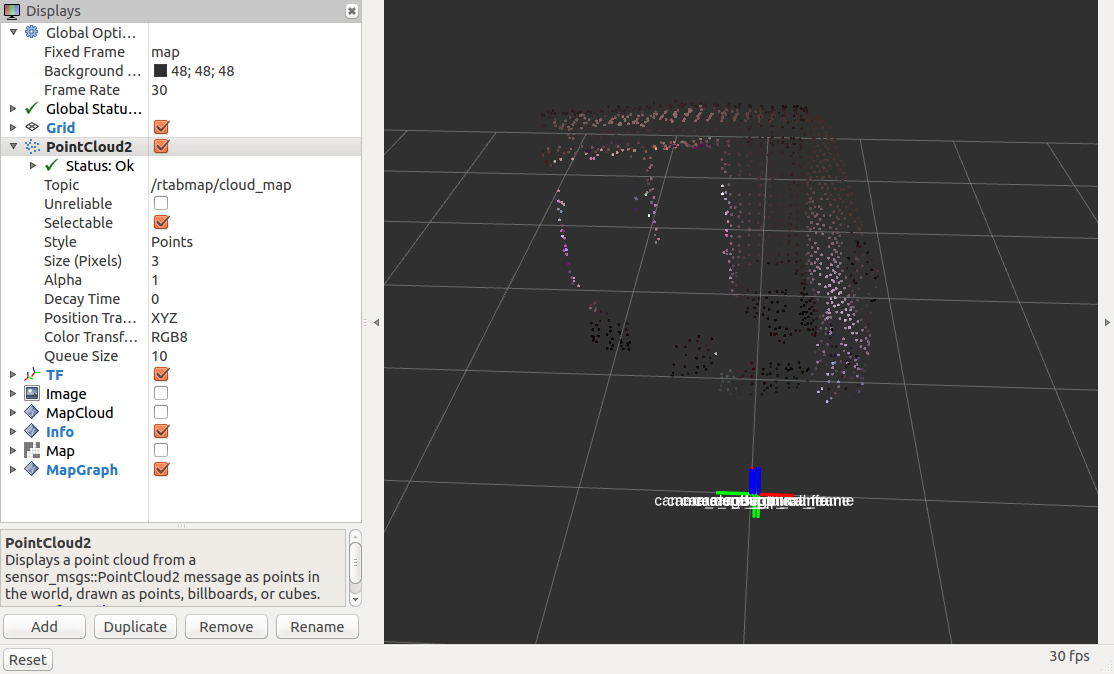
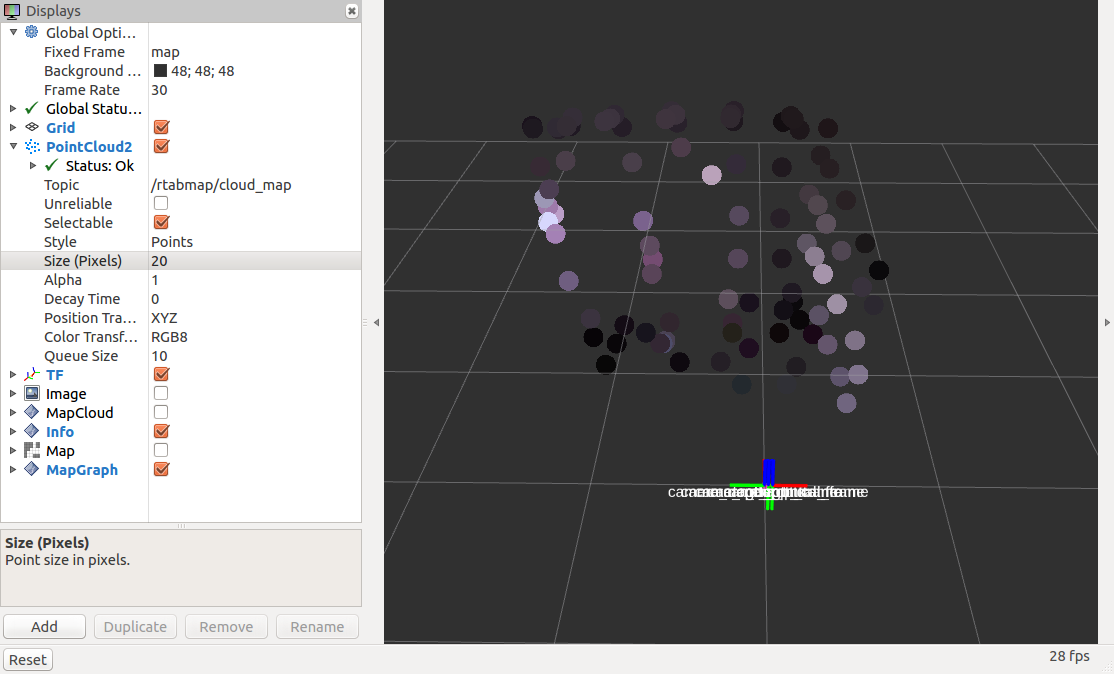
When going over 10 cm voxel, we should also set
Grid/MinClusterSize to 0 to avoid filtering all points.
$ roslaunch rtabmap_ros rtabmap.launch args:="-d --Grid/CellSize 0.5 --Grid/MinClusterSize 0" rtabmapviz:=false rviz:=true