Hi Matthieu,
Apologies for the late reply.
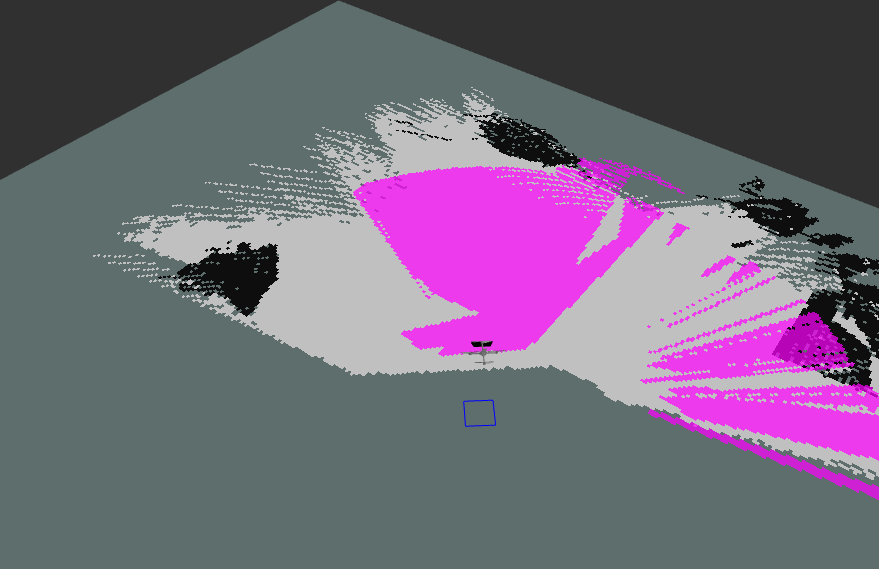
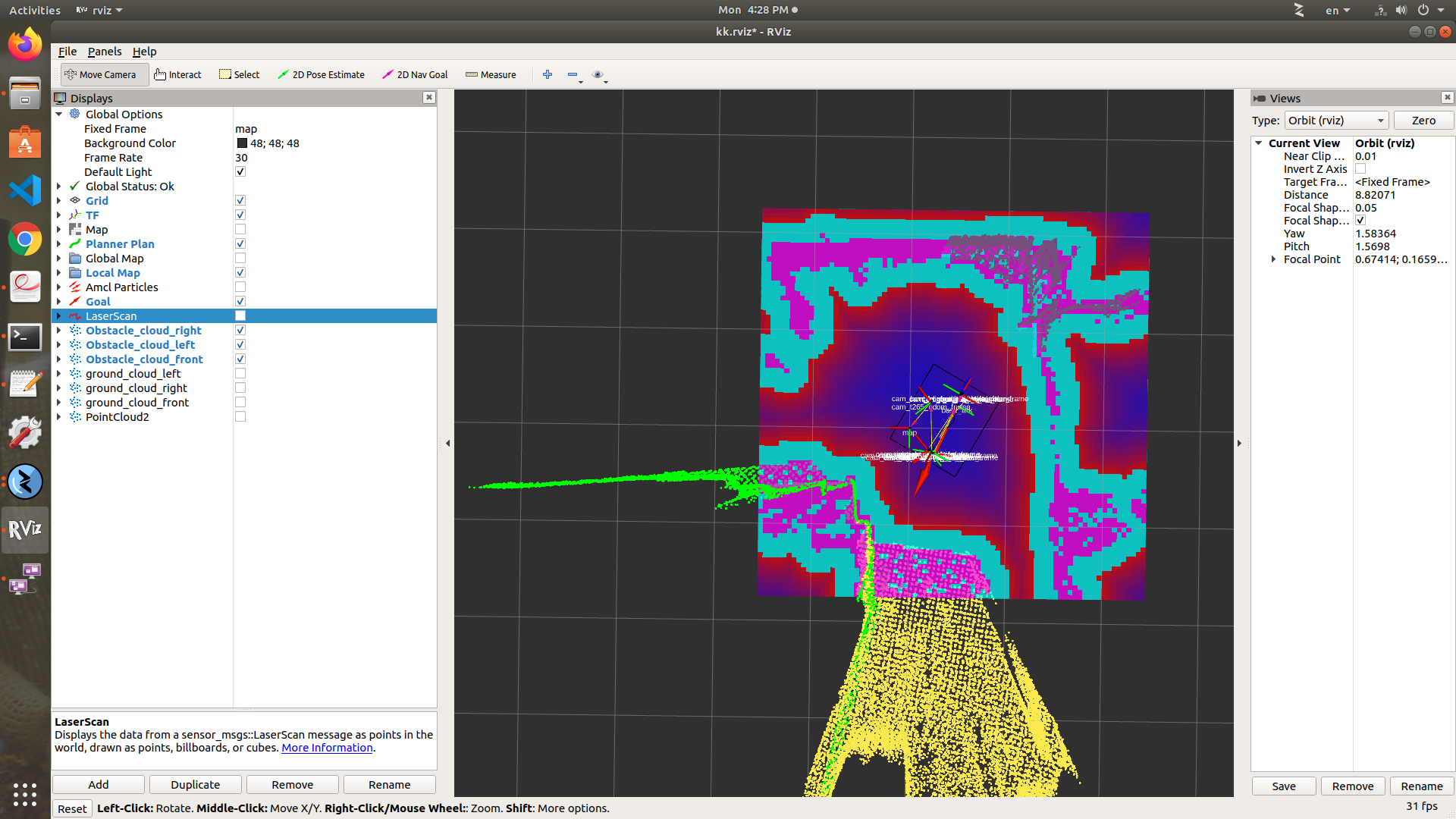
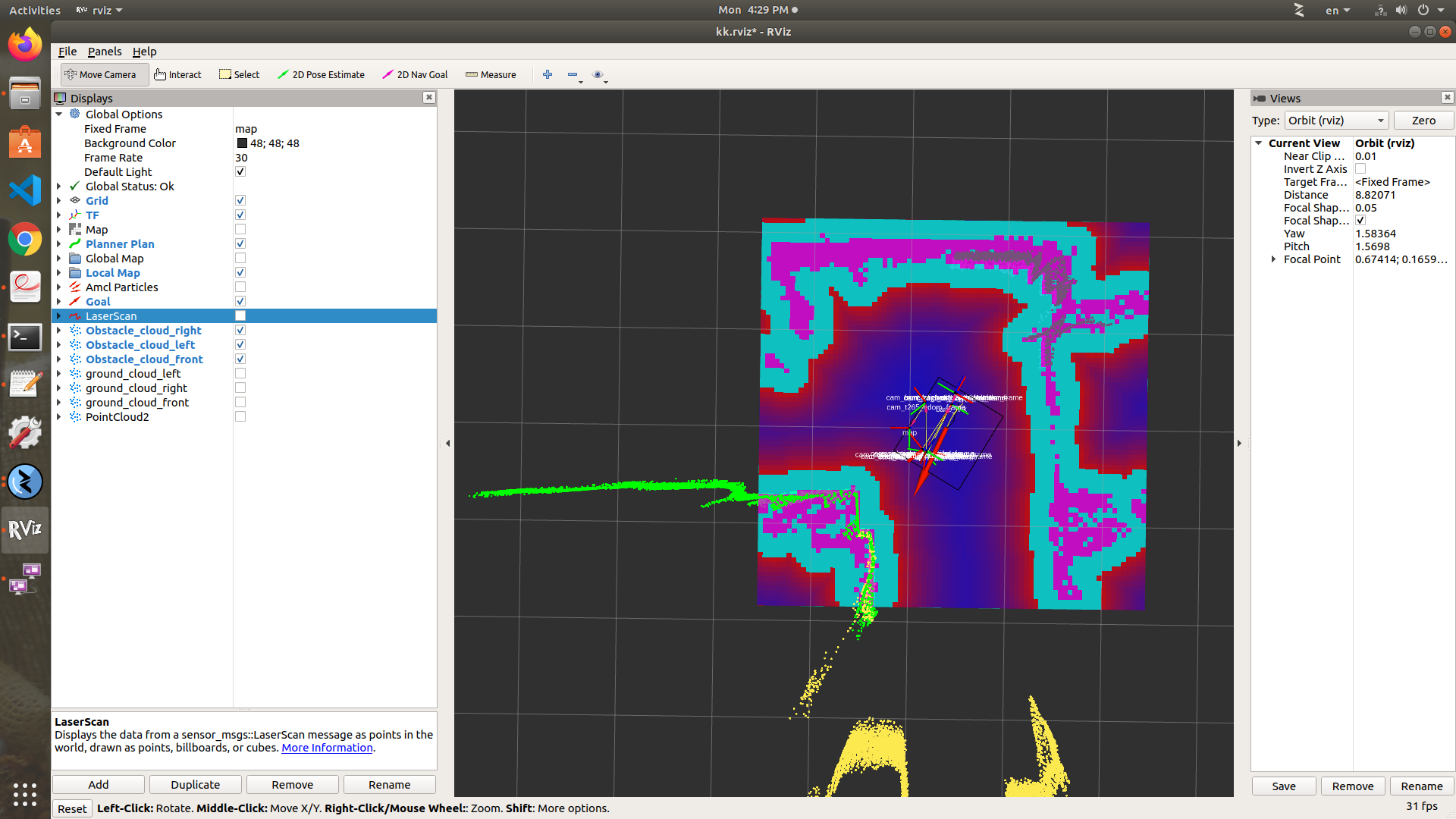
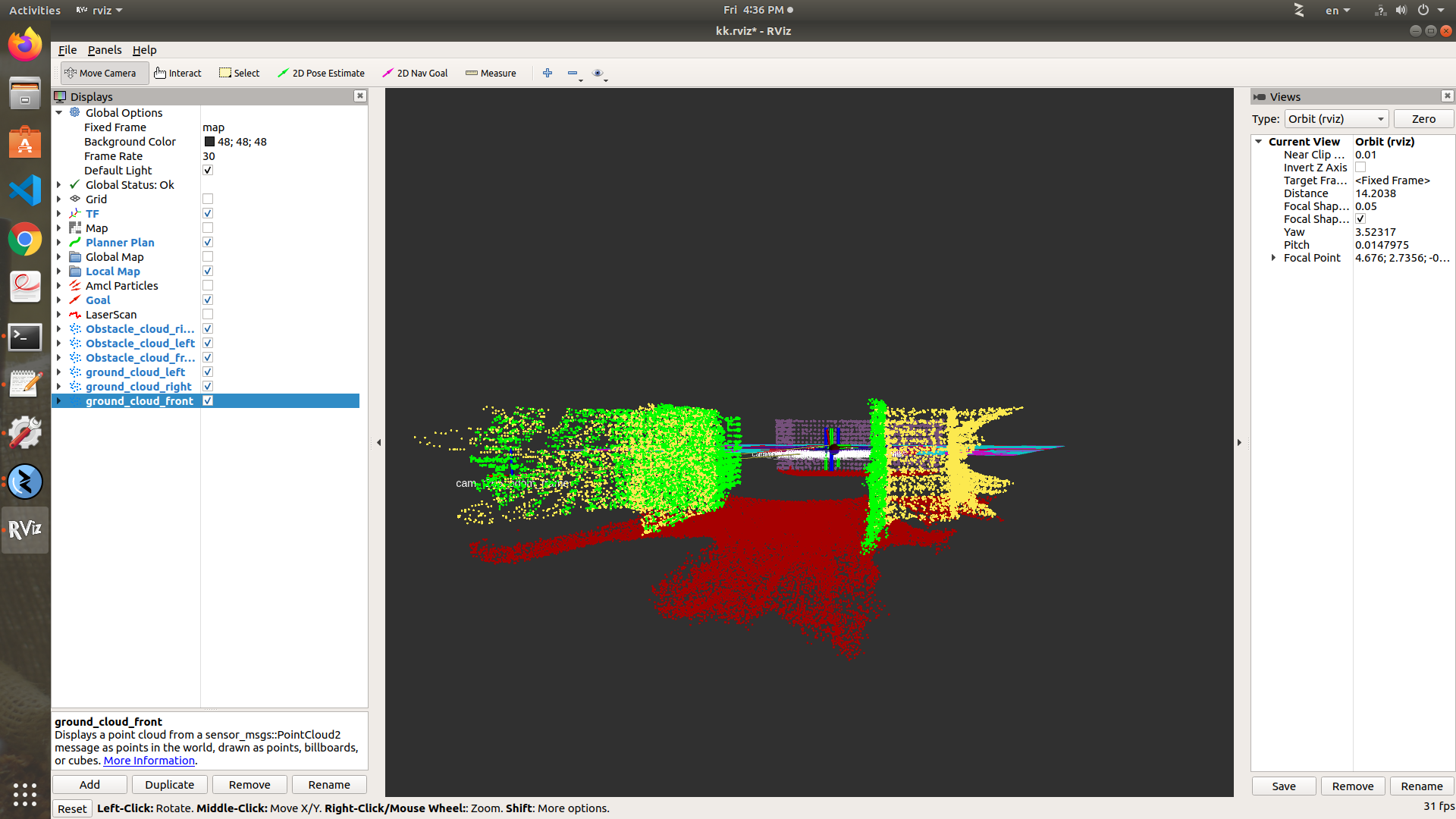
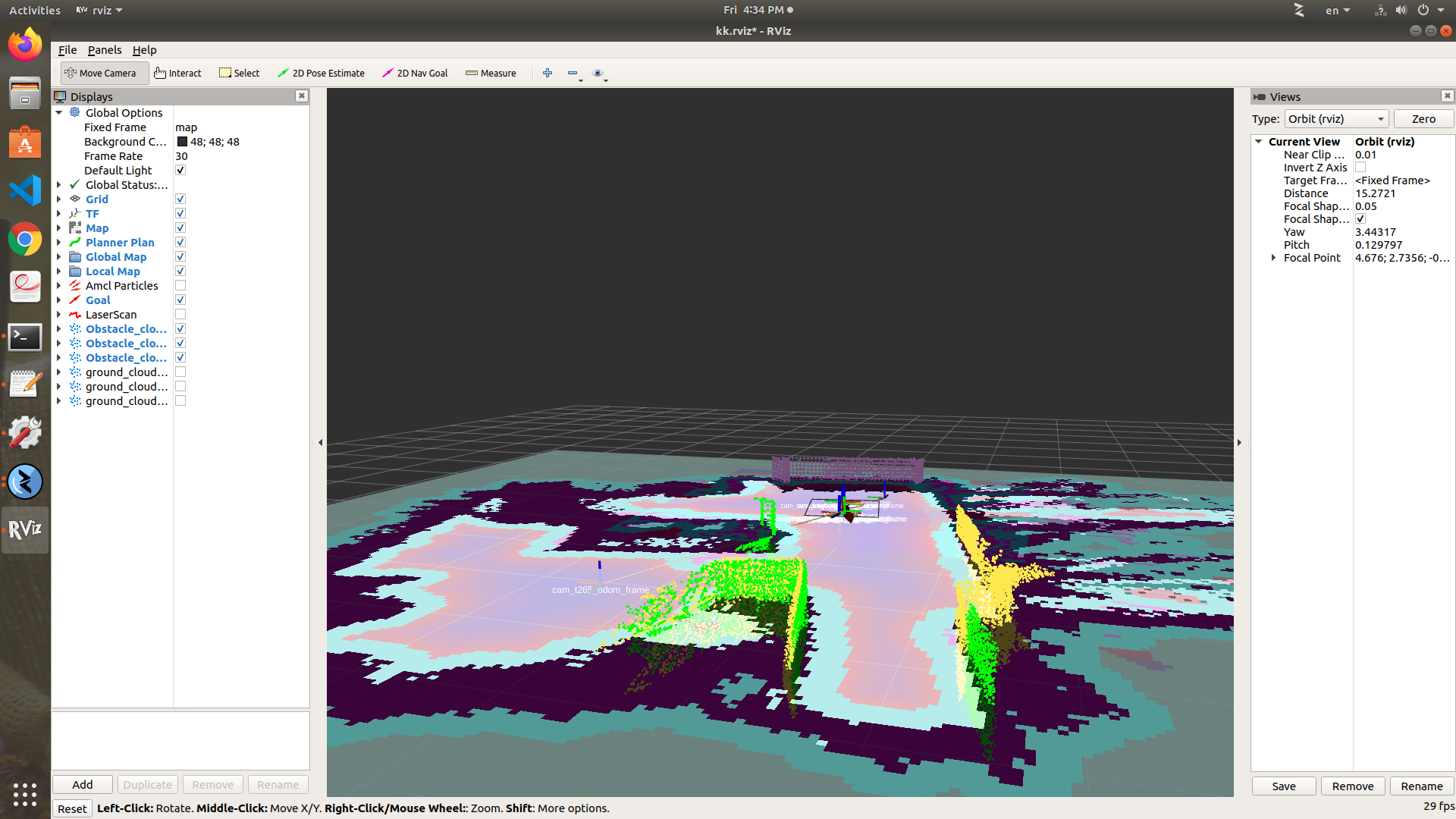
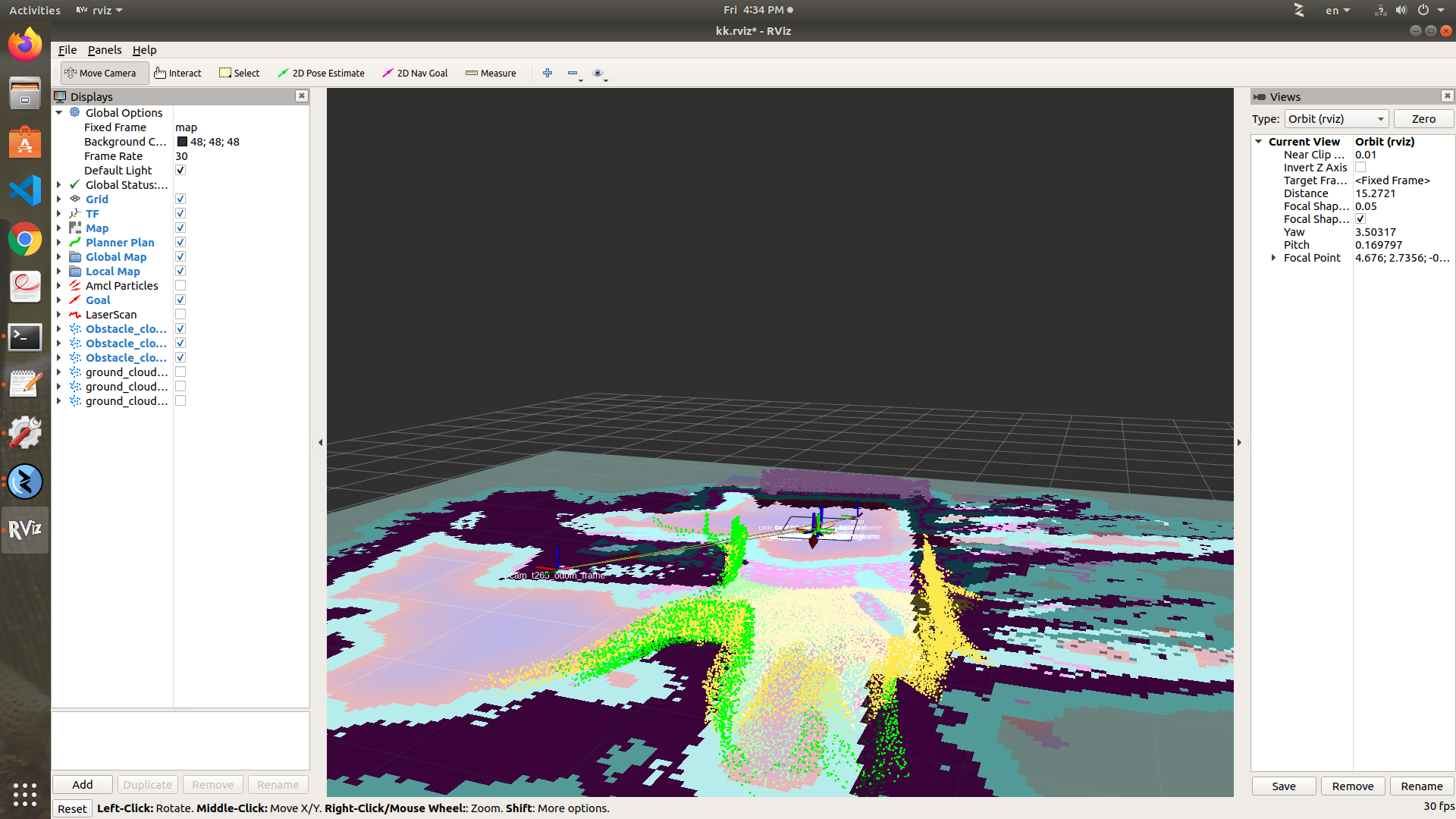
1 - yes , the yellow point the cloud as an obstacle cloud. alse the green (one for the right and the other for the left camera) - the red points to the ground cloud
2 - I did not understand the mean of " ground segmentation" , i think you mean considering a ground level ?
is this parameter : Grid/NormalsSegmentation with value="true"
enough for segmentation?
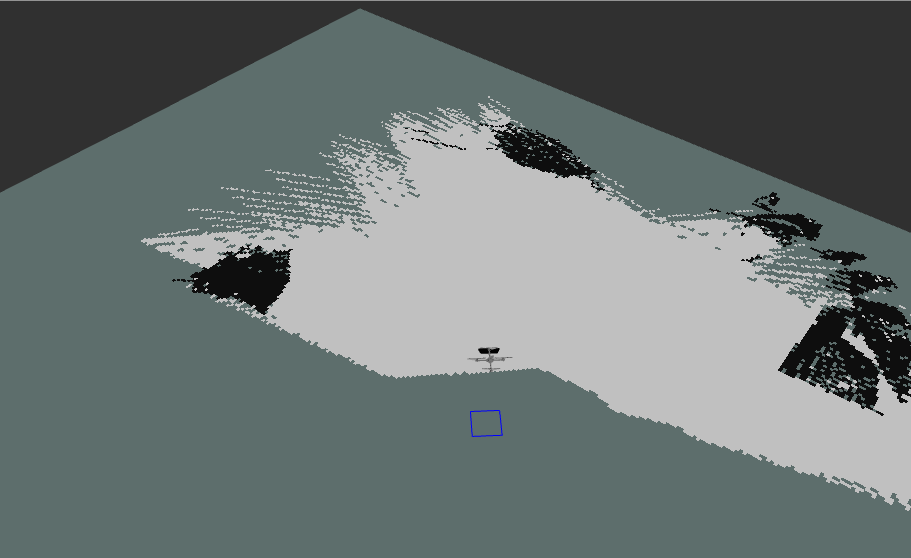
3 - From the top view it is difficult to see the height of the yellow point cloud, is it at the rviz grid level?
yes the yellow point cloud is of height 0.6 ( 0.3 above the grid level and 0.3 below it - the grid level is at the same level of the map frame.
4 - param name="Grid/MaxGroundHeight" type="string" value="-0.3"
param name="Grid/MaxObstacleHeight" type="string" value="0.3"
about these two parameter ,
the base link is at a height of 0.36 from the floor (ground)
the 3 camera (D435) are at the same level of the base_link
I choose MaxObstacleHeight with a value 0.3 ( i think you mean 0.3 not -0.3 as you mention in the previous reply ) and the Grid/MaxObstacleHeight with -0.3 to consider obstacles 30 cm below the base link and 30 cm above it.
so points below than 6 cm i did not want them to appear as obstacles in order to ignore small obstacles on the ground.
that is how I understand these parameters.

Thanks
TOM SMITH