I copied the launch file from this turtorial:
http://wiki.ros.org/rtabmap_ros/Tutorials/SetupOnYourRobot#KinectAnd modified like this:
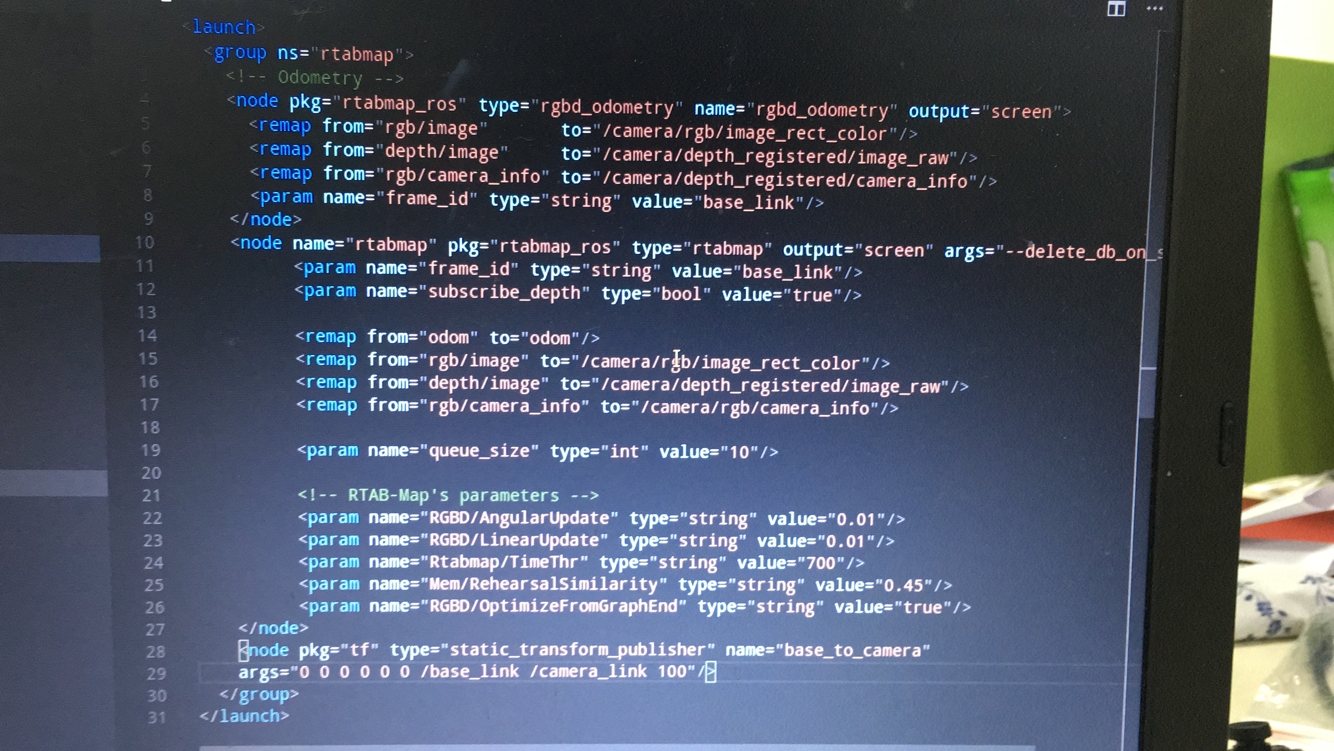
<launch>
<group ns="rtabmap">
<node pkg="rtabmap_ros" type="rgbd_odometry" name="rgbd_odometry" output="screen">
<remap from="rgb/image" to="/camera/rgb/image_rect_color"/>
<remap from="depth/image" to="/camera/depth_registered/image_raw"/>
<remap from="rgb/camera_info" to="/camera/depth_registered/camera_info"/>
< param name="frame_id" type="string" value="base_link"/>
< param name="wait_for_transform_duration" type="double" value="2"/>
</node>
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="--delete_db_on_start">
< param name="frame_id" type="string" value="base_link"/>
< param name="subscribe_depth" type="bool" value="true"/>
<remap from="odom" to="odom"/>
<remap from="rgb/image" to="/camera/rgb/image_rect_color"/>
<remap from="depth/image" to="/camera/depth_registered/image_raw"/>
<remap from="rgb/camera_info" to="/camera/rgb/camera_info"/>
< param name="queue_size" type="int" value="10"/>
< param name="wait_for_transform_duration" type="double" value="2"/>
< param name="RGBD/AngularUpdate" type="string" value="0.01"/>
< param name="RGBD/LinearUpdate" type="string" value="0.01"/>
< param name="Rtabmap/TimeThr" type="string" value="700"/>
< param name="Mem/RehearsalSimilarity" type="string" value="0.45"/>
< param name="RGBD/OptimizeFromGraphEnd" type="string" value="true"/>
</node>
<node pkg="tf" type="static_transform_publisher" name="base_to_camera"
args="0 0 0 0 0 0 /base_link /camera_link 100"/>
</group>
</launch>
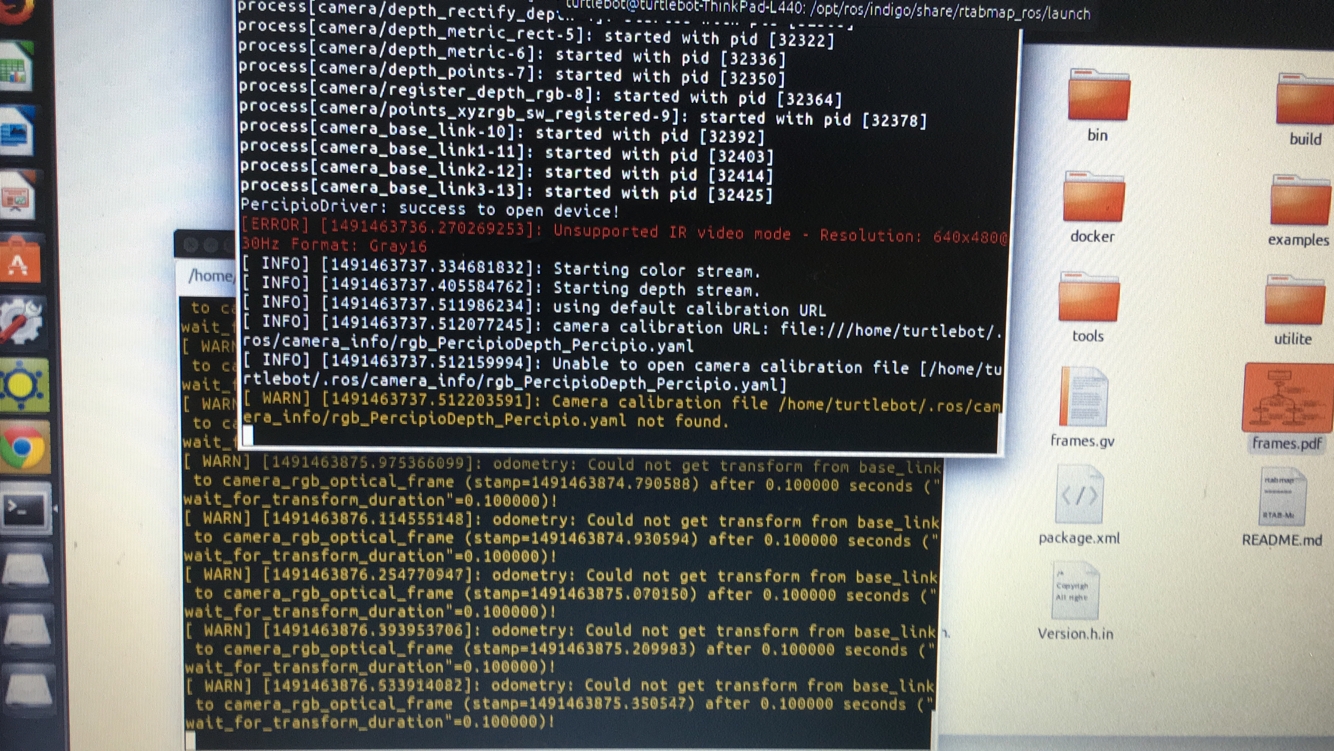
Still got warnning:
odometry:Could not get transform from base_link to camera_rgb_optical_frame
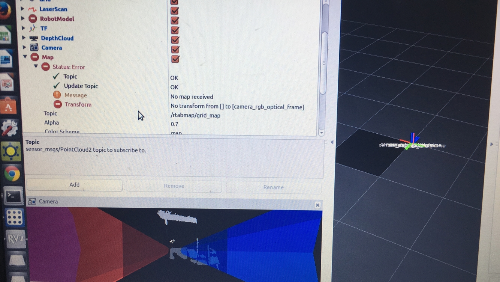
And rviz still not working
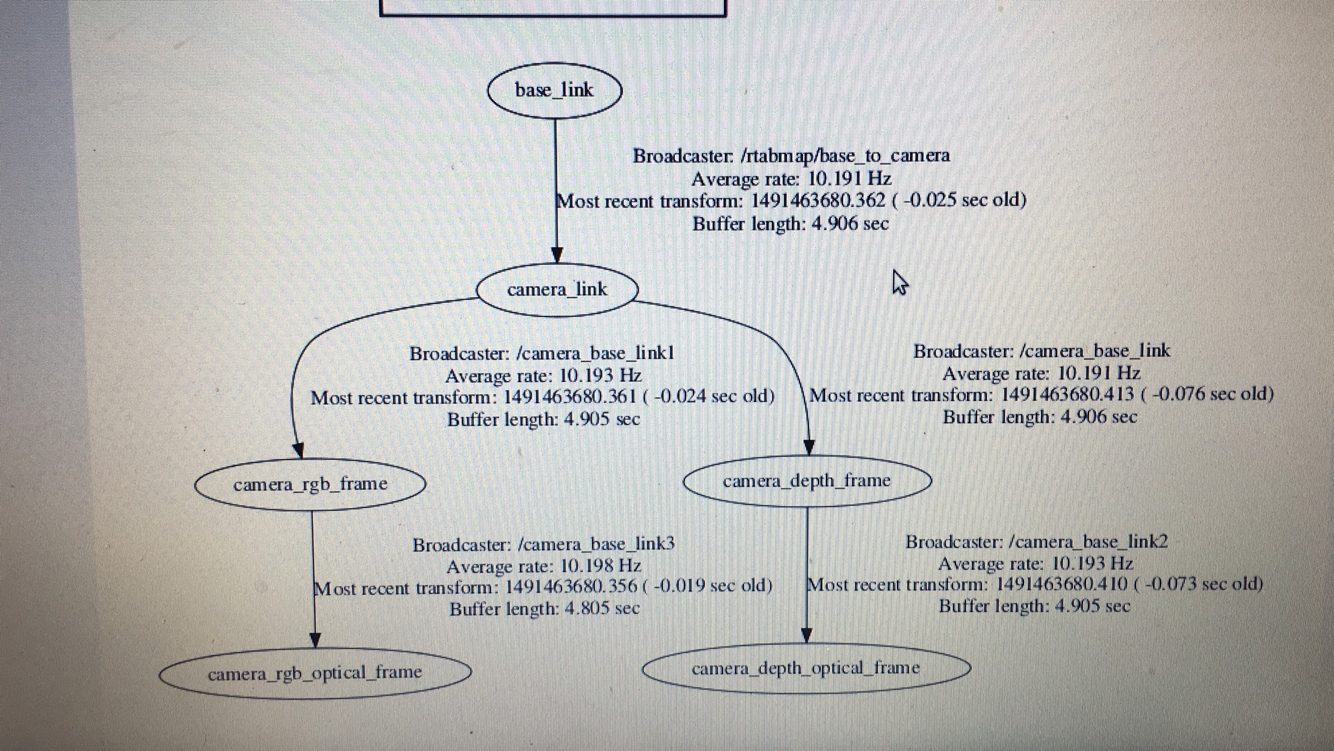
I`m confused about my tf tree that miss the /map -> /odom. Is there any problem in my launch file?
Any help is super appreciated! thx!