Hi,
I am trying to run RTAB on outdoor bag files we took with the Realsense R200 camera on a Clearpath Jackal. I ran the following code to record the bag files:
rosbag record -O justjackal.bag --split 1024 /bluetooth_teleop/joy /camera/camera_nodelet_manager/bond /camera/depth/camera_info /camera/depth/image /camera/depth/image_raw /camera/depth/points /camera/driver/parameter_descriptions /camera/driver/parameter_updates /camera/rectify_color/parameter_descriptions /camera/rectify_color/parameter_updates /camera/rgb/camera_info /camera/rgb/image_raw /cmd_drive /cmd_vel front/scan /joint_states /odometry/filtered /rosout /rosout_agg /status /tf /twist_marker_server/update /twist_marker_server/update_full /wifi_connected
I then run "rosparam set use_sim_time true" and "rosbag play --clock justjackal_0.bag", and then run the following RTAB launch code:
roslaunch rtabmap_ros rgbd_mapping.launch rtabmap_args:="--delete_db_on_start" odom:=/odometry/filtered rgb_topic:=/camera/rgb/image_raw depth_registered_topic:=/camera/depth/image_raw camera_info_topic:=/camera/rgb/camera_info queue_size:=10 RGBD/AngularUpdate:=0.01 RGBD/LinearUpdate:=0.01 Rtabmap/TimeThr:=700 Mem/RehearsalSimilarity:=0.45 RGBD/OptimizeFromGraphEnd:=true visual_odometry:=false odom_topic:=/odometry/filtered rtabmapviz:=true rviz:=false subscribe_scan:=true scan_topic:=/front/scan compressed:=true config_path:=~/august_2_megido_jackal19/justjackal frame_id:=odom
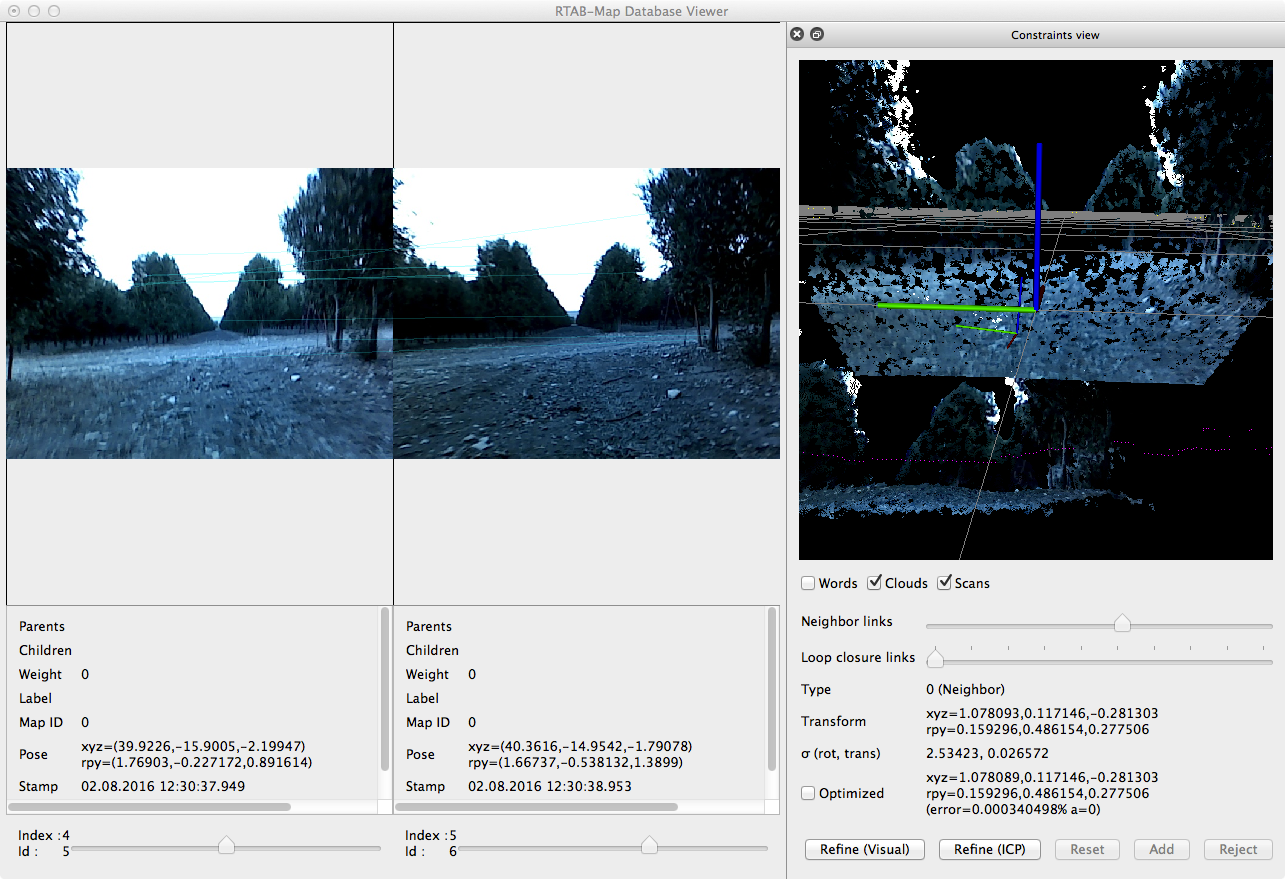
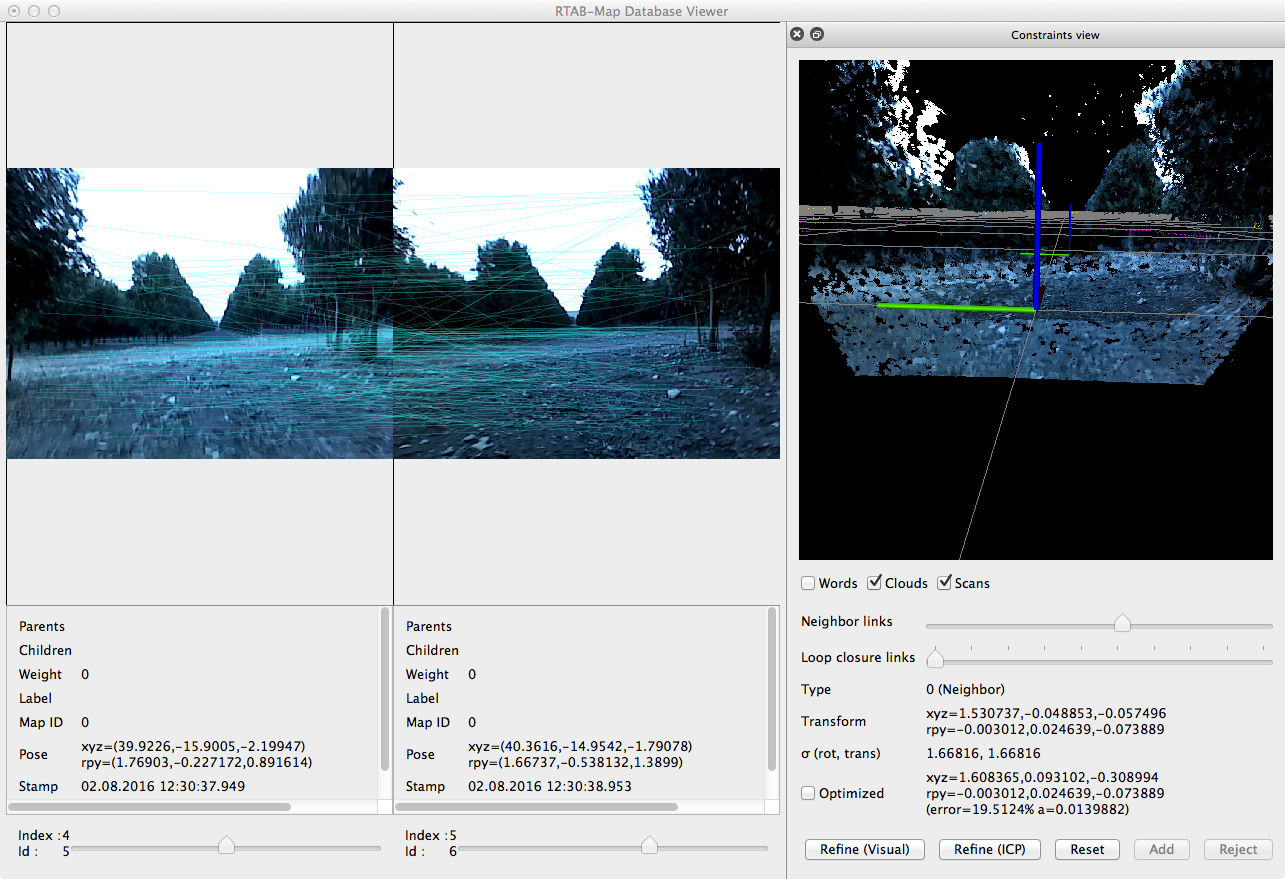
But I get the following warnings and messed up RTAB map:
[ WARN] [1470216120.608702263, 1470155297.373358939]: rtabmapviz: Could not get transform from odom to camera_depth_optical_frame after 0.200000 seconds (for stamp=1470155297.118691)!
[ WARN] [1470216120.608702612, 1470155297.373358939]: rtabmap: Could not get transform from odom to camera_depth_optical_frame after 0.200000 seconds (for stamp=1470155297.118691)!
[ERROR] [1470216120.608762425, 1470155297.373358939]: TF of received depth image 0 at time 1470155297.118691s is not set, aborting rtabmap update.
[ WARN] [1470216120.812503232, 1470155297.576390646]: rtabmapviz: Could not get transform from odom to camera_depth_optical_frame after 0.200000 seconds (for stamp=1470155297.151934)!
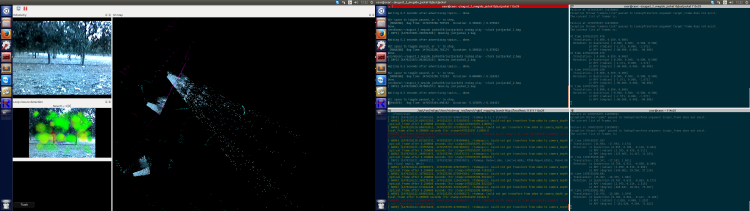
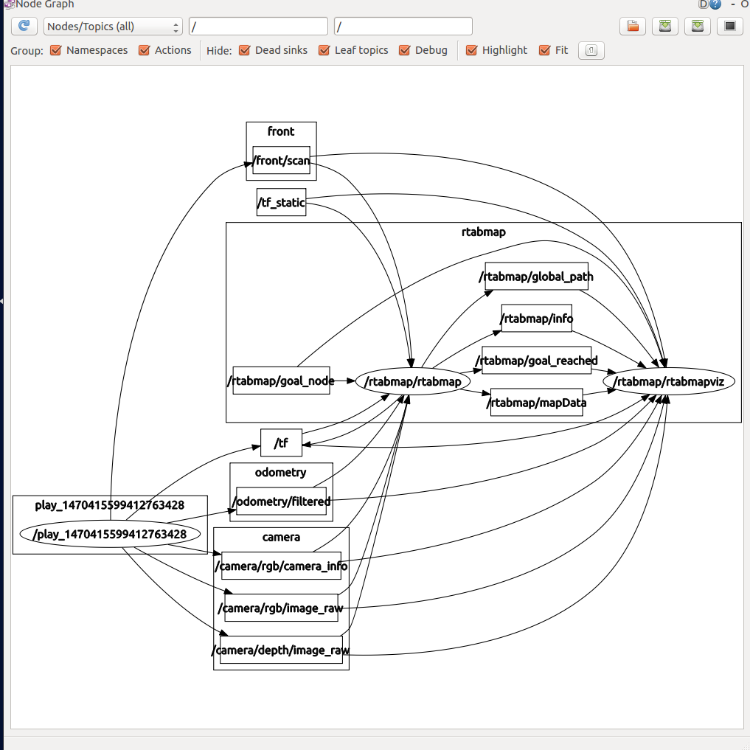
^ The top and bottom right terminals are me running "rosrun tf tf_echo /camera_link /camera_depth_optical_frame" and "rosrun tf tf_echo /odom /camera_link" respectively, showing that the tfs are actually being published, but the RTAB seems to not be recognizing them.
I then try to run my RTAB with a modified launch file according to this thread:
http://answers.ros.org/question/224250/rtabmap_ros-with-realsense-odometry-could-not-get-transform-from-base_link-to-camera_color_optical_frame/ ,
but even adding this line:
"
<node pkg="tf" type="static_transform_publisher" name="base_to_realsense"
args="0 0 0 -1.5707963 0 -1.5707963 /base_link /realsense_frame 100" />"
Does not help, I get the following (slightly different) tf errors:
[ WARN] [1470216364.095011744, 1470155298.225915932]: rtabmapviz: Could not get transform from odom to front_laser after 1.000000 seconds (for stamp=1470155297.144756)!
[ WARN] [1470216365.346593488, 1470155299.477246454]: rtabmapviz: Could not get transform from odom to camera_depth_optical_frame after 1.000000 seconds (for stamp=1470155298.418318)!
Let me know what I might be doing wrong, thanks for all the help!!
Gabe