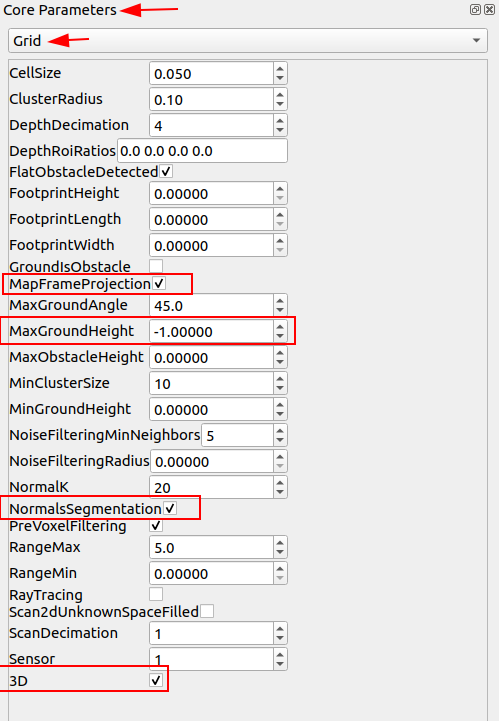
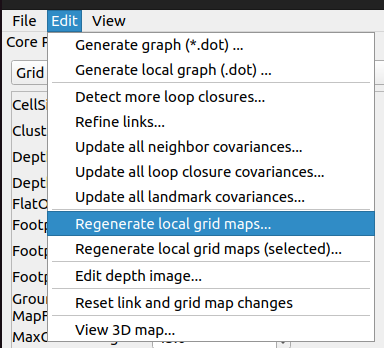
It is possible to generate a 2D occupancy grid from iPhone data. We don't generate the occupancy grid by default with the iPhone app, so you need to open the database in rtabmap-databaseViewer, set these parameters (in Core Parameters view) and click on Edit->"Regenerate all local grids..."
We set MaxGroundHeight to -1 because the z=0 with the iPhone is the height at which we start scanning, which usually around 1.5 meters above the ground (setting to -1 here means the ground is expected to be below 50 cm assuming the scan started at 1.5 meters).
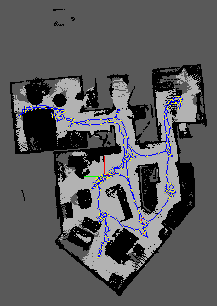
Example of scan taken with iPad:
 However
However, even if you can get a nice 2D occupancy grid, the major roadblock you will get next is how the robot can localize on that map. You didn't specify what sensors the robot is using, but if it is 2D lidar based, maybe you could use the 2D map and AMCL to localize. If it is camera-based, it won't work using visual localization, because the point of view would be very likely different than the one during the scan with the phone. Faking a laser scan with the camera could be possible, similarly to this
example, but use AMCL instead of rtabmap, though it is a long-shot.
cheers,
Mathieu

