Hi Mathieu,
I'm currently using the last standalone RTAB-Map version 0.19.6
I've also just tried pulling the last version from master branch, but with same results.
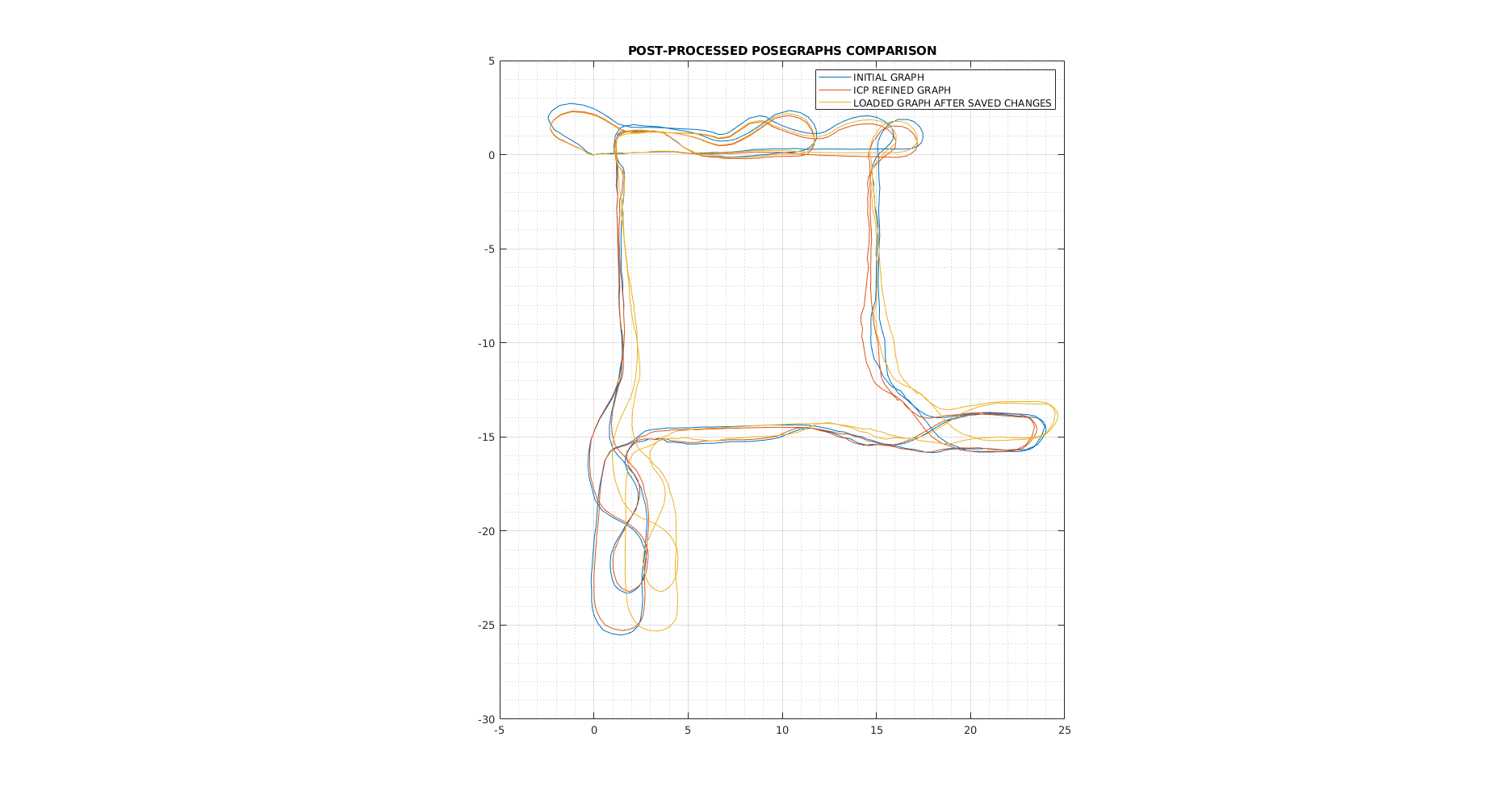
I post the image of an analysis of the extracted poses from rtabmap-databaseViewer:
1.The Blue line refers to the graph as soon as it is opened for the first time before any processing.
2.The Red line refers to the refined graph via ICP, before closing it, the poses are exported and plotted.
At this step, the refined graph gets closed and the refined links saved.
Then the same just saved database gets opened again.
3.The Yellow line refers to the graph loaded the second time.
As you can see, the last graph really differs with respect to the second one (we expect them to overlap).
I sent you an e-mail with the link to the database.
Thank you a lot for your support!!
Cheers
Davide