hello! I have a two question about database-viewer.
1. I saved the .db through the bag and ran the database-viewer to work as shown in the figure below.
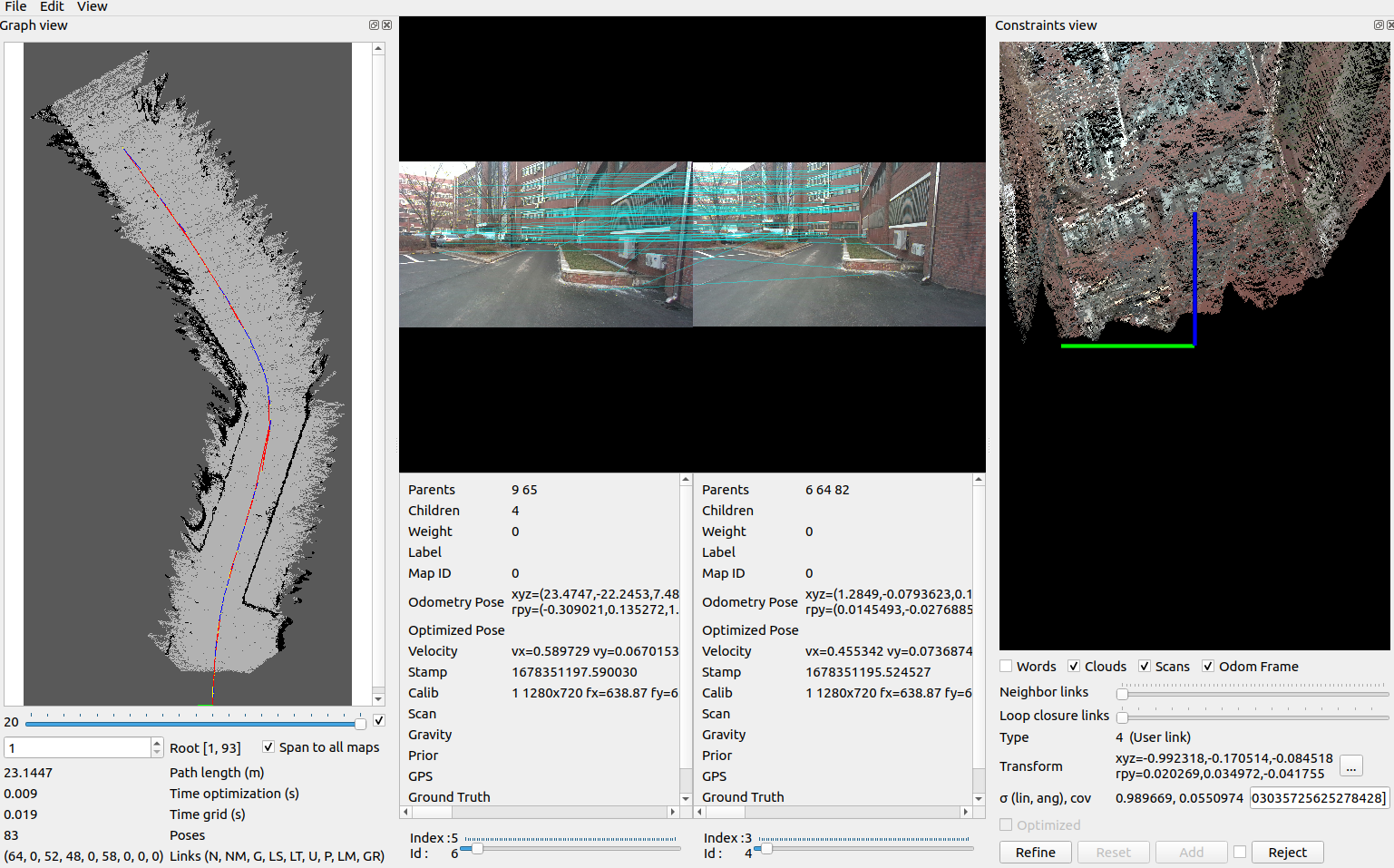
This is the original picture, but I made it like that by deleting and adding mismatched images one by one through the constraints view. I was wondering if there is any way to make this more convenient.
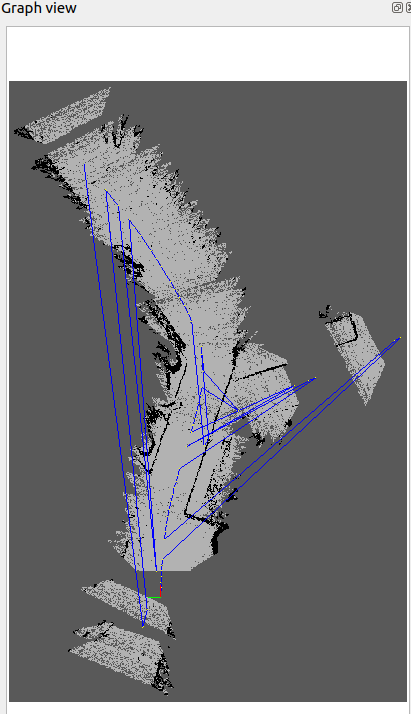
2. I tried to merge the modified .db with another .db like in #1, but the merged graph came out as the original .db instead of the .db that I modified. Attached a picture for better understanding.
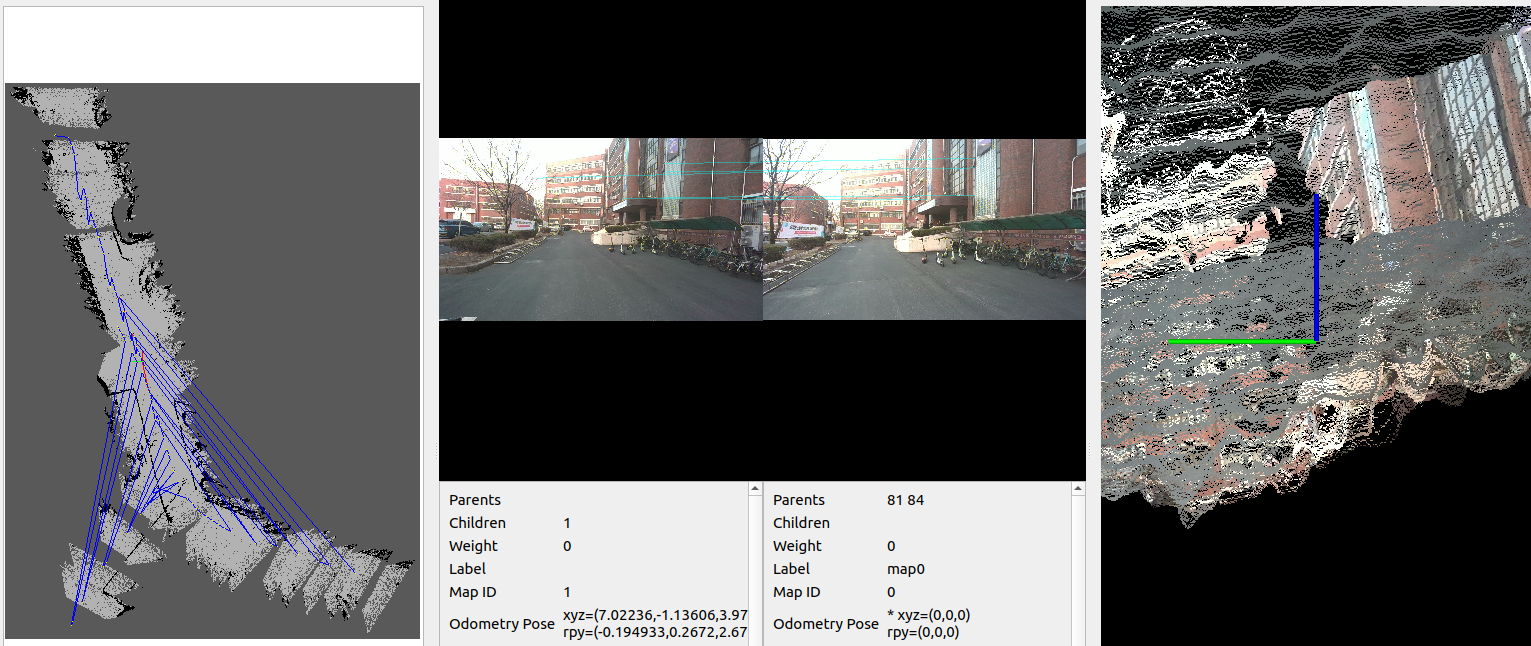
How can I merge the .db I modified with another .db?
please answer about my question.

