Hi Mathieu,
we currently have a problem with navigation that we are not quite sure how to solve with RTABMAP.
We use a multi-session database in localization mode for navigation (with memory management). For this, an occupancy map was saved with the map_saver, graphically edited and used as global costmap for move_base. So besides /rtabmap/grid_map, we use this map on a different topic.
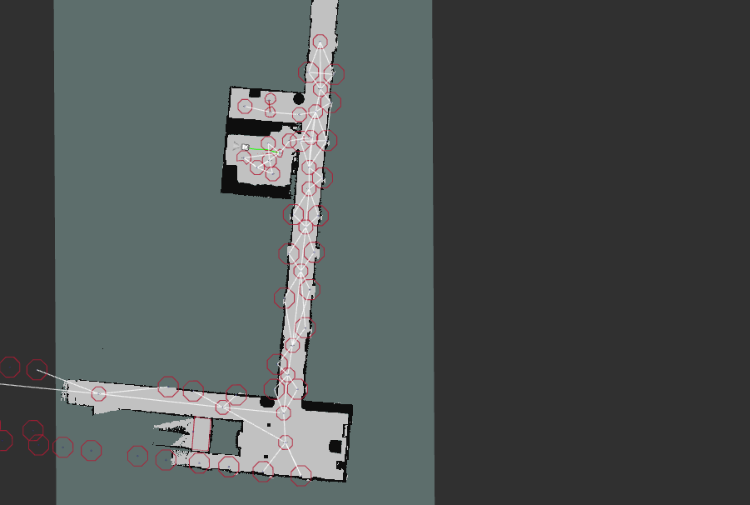
Navigation is controlled by a topological map that directly addresses move_base and other action servers for charging etc. The following image shows the nodes and links of our topological map. The nodes are defined as poses in map frame
The problem is, that there are sometimes shifts between the modified map and /rtabmap/grid_map (Image shows the current /rtabmap/grid_map above the static modified map)
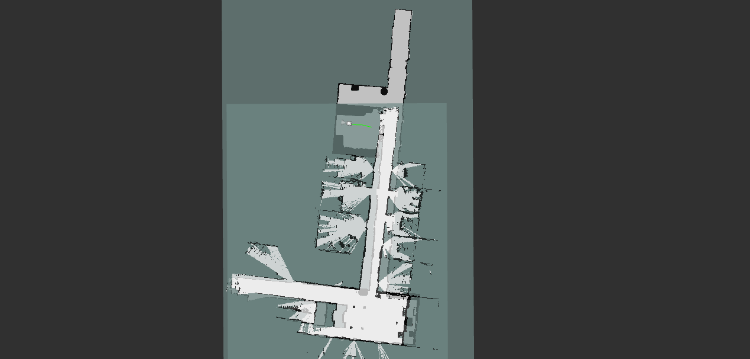
I guess this is due to switches between local maps of the nodes in the area around the robot.
This leads to the problem, that move_base's global planner does not find valid paths from time to time.
How can we use globally defined poses as navigation goals?
Would it be necessary to wrap /rtabmap/set_goal around our move_base interface? Or is this related to a different problem?
The parameter OptimizeFromGraphEnd is set to false.
Regards
Marvin

