thanks Mat for your fast reply
this is my Grid parameters :
param name="Grid/FromDepth" type="string" value="true"
param name="Grid/NoiseFilteringRadius" type="string" value="0.1"
param name="Grid/NoiseFilteringMinNeighbors" type="string" value="10"
param name="Grid/3D" type="bool" value="false"
param name="Grid/RayTracing" type="bool" value="true"
param name="Grid/MaxGroundHeight" type="string" value="-0.3"
param name="Grid/MaxObstacleHeight" type="string" value="0.3"
param name="Grid/NormalsSegmentation" type="string" value="true"
param name="Grid/FlatObstacleDetected" type="bool" value="false"
param name="Grid/GroundIsObstacle" type="bool" value="false"
param name="Grid/RangeMax" type="string" value="5.0"
param name="Grid/RangeMin" type="string" value="0"
param name="Grid/MapFrameProjection" type="bool" value="true
1 - I am not using NormalsSegmentation because the robot is now navigating on a flat ground in the university lab.
2 - I am interesting in knowing your opinion about the benifits of enabling NormalsSegmentation.
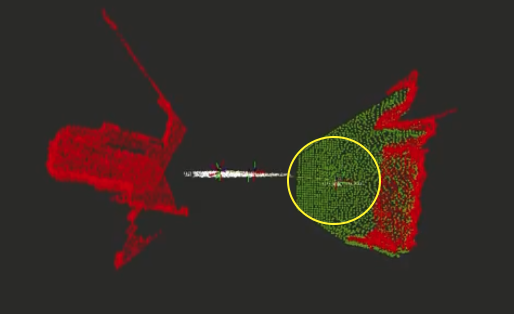
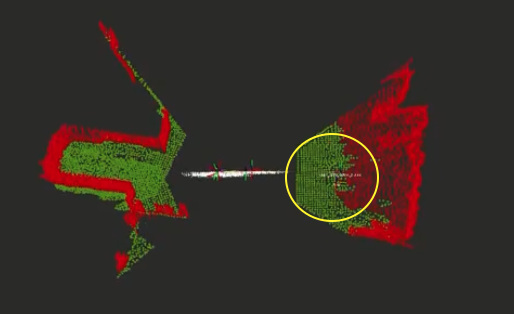
3 - I am sure that the robot is not tilting , but i a investigating now to know what happens on 0:13 to know if there a problem in the cameras. I am using 3 D435 cameras and T265 for odometry. may this problem a failure in the function of T265 ?
TOM SMITH