Hi,
I've been having some problems in building a 3D map without a regular odometry source, using only the rgbd camera and lidars. So, I decided to do a sanity check following the exact steps described in the equivalent tutorial,
here. But I'm still facing errors:
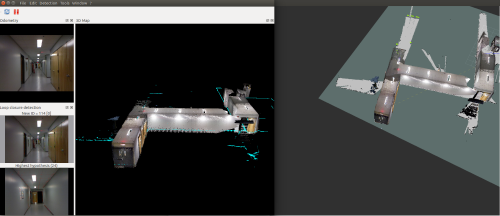
At first, everything seems to go smooth:
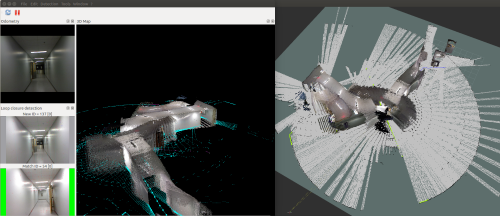
But around 150s on the bag, when the first (and only I think) loop closure is detected, this happens:
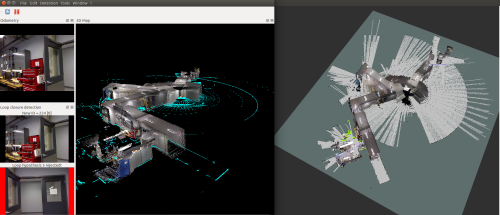
In the end, the map looks like this:
Can someone try and see if you can reproduce the problem? Or is it something wrong with my setup (Ubuntu 16 and ros Kinetic)? Funny thing is that I had no problems when running demo_robot_mapping.launch...
Thanks in advance,
Vinicius

