Hi Sandeep,
I am glad that you find RTAB-Map useful!
You didn't mention any sensor, do you need to detect these "cliffs" with vision or lidar? Vacuum robots have often cliff sensors under them (simple IR pointing on the ground) to avoid falling in the stair for example.
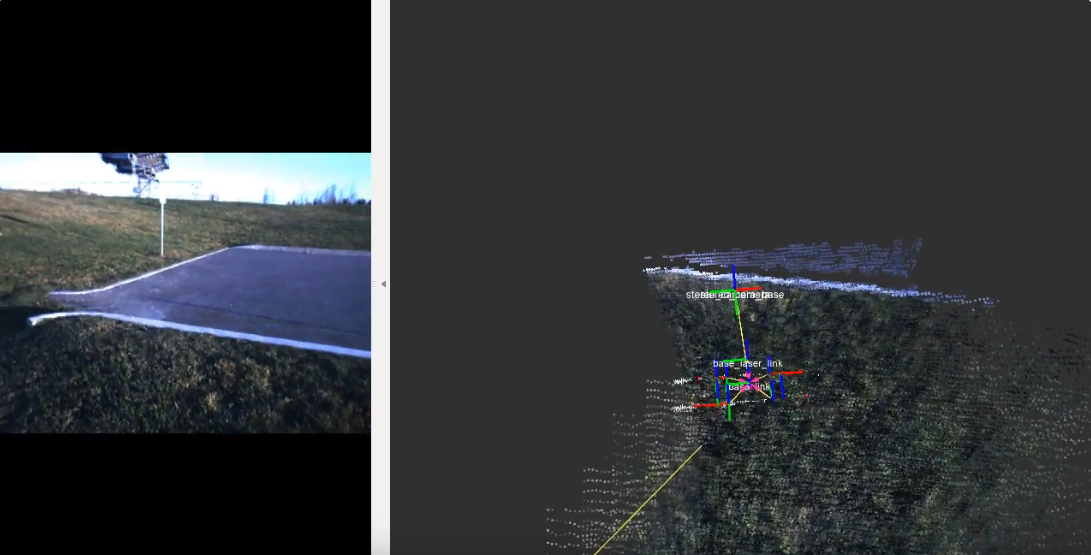
With vision, if the camera can actually see quite well the ground, you could disable ray tracing and set a minimum height for the ground. Like in this
video at 5:42, the robot is approaching a curb (from the top), we can see that no point would be created just the other side of the curb that the camera cannot see. In the occupancy grid, the cells will remain "unknown". By setting also "Grid/MinGroundHeight=-0.05", the ground seen under 5 cm of the current base frame of the robot (i.e. current floor) will be labelled as obstacles. So to make sure to not fall, the robot must not navigate on "unknown" cells and the usual obstacle cells.
Regards,
Mathieu

