I've been trying to fix/debug this warning message for awhile now and I'm at a lost right now.
[ WARN] [1522357529.160766392]: /rtabmap/rtabmap: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). If topics are not published at the same rate, you could increase "queue_size" parameter (current=10).
/rtabmap/rtabmap subscribed to (approx sync):
/rtabmap/odom,
/rtabmap/rgbd_image
[ WARN] [1522357533.686427808]: /rtabmap/rgbd_odometry: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set.
/rtabmap/rgbd_odometry subscribed to:
/rtabmap/rgbd_image
Here is our setup
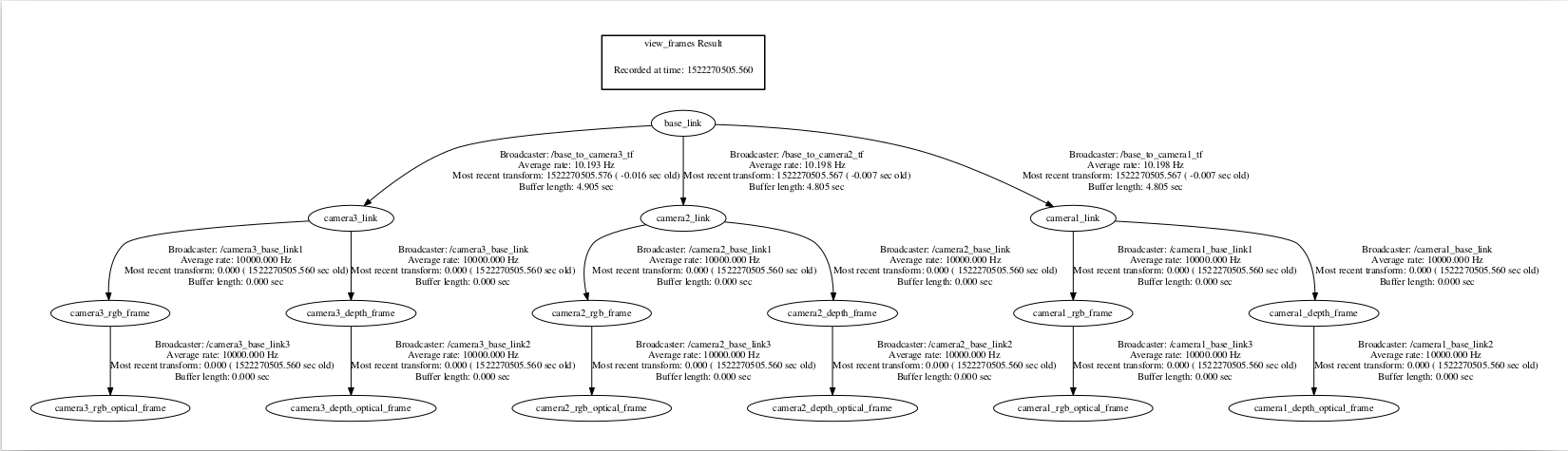 frames.pdf
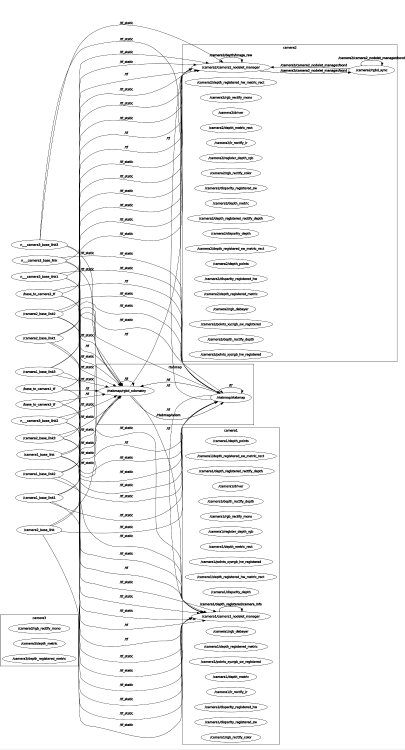
frames.pdfNode Graph
Launch file on the MASTER computer
test.launchI've already ran
$ rostopic hz /rtabmap/odom
$ rostopic hz /camera1/rgbd_image
$ rostopic hz /camera2/rgbd_image
$ rostopic hz /camera3/rgbd_image
And they all say no new message.
After searching, I have a good feeling it maybe a remapping issue or a queue_size issue.
P.S.- We are able to see PointCloud2 in RVIZ.
Any help would be appreciated!

