Difference in odometry topic of rgbdicp_odometry and final output.


|
Hi Mathieu,
I am trying to incorporate in a launch file the rgbdicp_odometry node. So far this is my launch file. <launch>
<arg name="rtabmapviz" default="true"/>
<arg name="frame_id" default="imu_link"/>
<arg name="scan_cloud_max_points" default="131072"/>
<param name="use_sim_time" value="true"/>
<arg name="common_params" value="--RGBD/CreateOccupancyGrid false \
--Rtabmap/DetectionRate 2 \
--Odom/ScanKeyFrameThr 0.9 \
--OdomF2M/ScanMaxSize 25000 \
--OdomF2M/ScanSubtractRadius 0.5 \
--Icp/PM true \
--Icp/VoxelSize 0.5 \
--Icp/MaxTranslation 5 \
--Icp/MaxCorrespondenceDistance 1.5 \
--Icp/PMOutlierRatio 0.8 \
--Icp/Iterations 10 \
--Icp/PointToPlane true \
--Icp/PMMatcherKnn 3 \
--Icp/PMMatcherEpsilon 0 \
--Icp/Epsilon 0.0001 \
--Icp/PointToPlaneK 10 \
--Icp/PointToPlaneRadius 0 \
--Icp/CorrespondenceRatio 0.01 \
--Odom/GuessSmoothingDelay 1"/>
<node pkg="tf2_ros" type="static_transform_publisher" name="odom_to_guess" args="0 0 0 0 0 0 1 odom odom_guess"/>
<node pkg="tf2_ros" type="static_transform_publisher" name="imu_to_camera" args="-0.01 0.028 0 0.9999598 -0.0033599 -0.0021211 -0.0080401 imu_link camera_link"/>
<node pkg="tf2_ros" type="static_transform_publisher" name="imu_to_velodyne" args="0 0.15 0.075 0 0 0 1 imu_link velodyne"/>
<group ns = "rtabmap">
<node pkg="rtabmap_ros" type="rgbdicp_odometry" name="rgbdicp_odometry" output="screen" args=" $(arg common_params)">
<param name="frame_id" type="string" value="$(arg frame_id)"/>
<remap from="scan_cloud" to="/velodyne_points"/>
<remap from="depth/image" to="/camera/aligned_depth_to_color/image_raw"/>
<remap from="rgb/camera_info" to="/camera/color/camera_info"/>
<remap from="rgb/image" to="/camera/color/image_raw"/>
<param name="scan_normal_k" type="int" value="10"/>
<param name="subscribe_scan_cloud" type="bool" value="true"/>
<param name="subscribe_depth" type="bool" value="true"/>
<param name="approx_sync" type="bool" value="true"/>
<param name="Vis/MinInliers" type="string" value="10"/>
<param name="Vis/FeatureType" type="string" value="0"/>
<param name="Kp/NndrRatio" type="string" value="0.05"/>
<param name="Kp/MaxFeatures" type="string" value="500"/>
<param name="Vis/CorNNDR" type="string" value="5"/>
<param name="RGBD/OptimizeMaxError" type="string" value="5.0"/>
</node>
<node pkg="rtabmap_ros" type="rtabmap" name="rtabmap" output="screen" args="-d $(arg common_params)">
<param name="frame_id" type="string" value="$(arg frame_id)"/>
<param name="subscribe_depth" type="bool" value="false"/>
<param name="subscribe_rgb" type="bool" value="false"/>
<param name="subscribe_scan_cloud" type="bool" value="true"/>
<param name="approx_sync" type="bool" value="true"/>
<param name="scan_cloud_max_points" type="int" value="$(arg scan_cloud_max_points)"/>
<remap from="scan_cloud" to="/velodyne_points"/>
</node>
<node if="$(arg rtabmapviz)" pkg="rtabmap_ros" type="rtabmapviz" name="rtabmapviz" output="screen">
<param name="frame_id" type="string" value="$(arg frame_id)"/>
<param name="odom_frame_id" type="string" value="odom"/>
<param name="subscribe_odom_info" type="bool" value="true"/>
<param name="subscribe_scan_cloud" type="bool" value="true"/>
<param name="approx_sync" type="bool" value="true"/>
<remap from="scan_cloud" to="/velodyne_points"/>
</node>
</group>
</launch>By calling rosnode info /rtabmap/odom and visualizing it on rviz it seems that it is working as intended. Here is a screen shot of how the poses are computed. \ 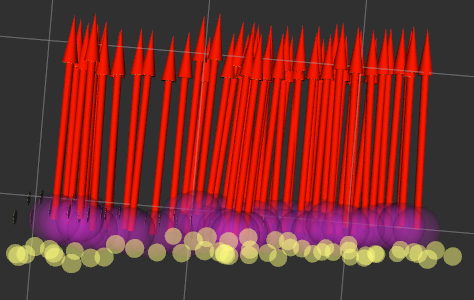 Although this seems fairly reasonably accurate the output at the gui is the following: 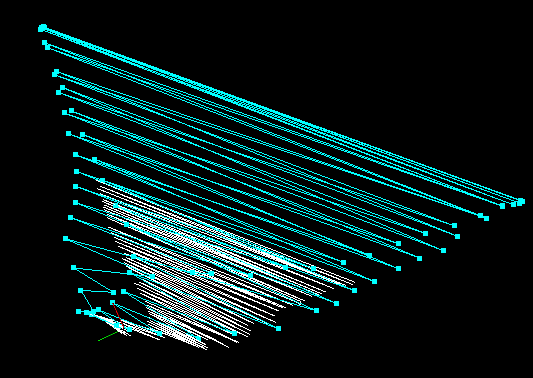 And the pointcloud is very messy. 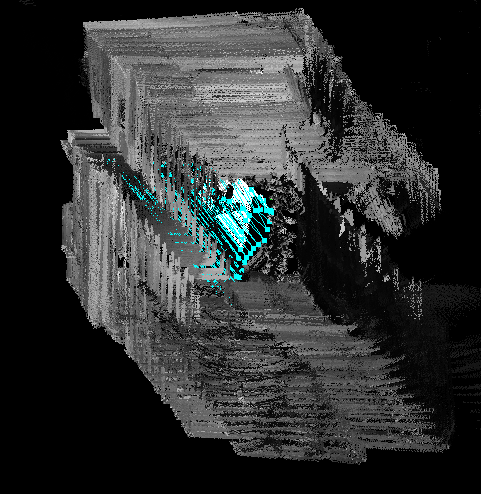 Can you help me understand what's going on ? |
|
Administrator
|
Hi,
I see that you set use_sim_time to true, I assume this was done on a rosbag? Make sure that your bag doesn't have the same TF published than those recomputed here. rgbdicp_odometry has not been updated for a while, and would have to use rgbd_image interface (instead of approximatly synchronized all individuals topics all together). Is TF odom->odom_guess used somwhere? For the poses, it could be easier to debug with rtabmap-databaseViewer and look at the neighbor links in Constraints View. |
«
Return to Official RTAB-Map Forum
|
1 view|%1 views
| Free forum by Nabble | Edit this page |