Does laser and rgbd camera work in odometry estimation?

Does laser and rgbd camera work in odometry estimation?

|
Hello Mathieu,
I run the rtabmap with IMU, wheel odometry, laser and Kinect in Gazebo. I want to know in my launch file below, does laser and rgbd camera work in odometry estimation? I guess the laser and rgbd camera is just for mapping here, wheel odometry and IMU fused by ekf_localization estimate the odometry. However, the laser should achieve proximity detection. Could you please provide some advice? Thanks a lot. The launch file is below:
<launch>
<arg name="database_path" default="rtabmap.db"/>
<arg name="rgbd_odometry" default="false"/>
<arg name="rtabmapviz" default="false"/>
<arg name="localization" default="false"/>
<arg name="simulation" default="false"/>
<arg name="sw_registered" default="false"/>
<arg if="$(arg localization)" name="args" default=""/>
<arg unless="$(arg localization)" name="args" default="--delete_db_on_start"/>
<arg if="$(arg simulation)" name="rgb_topic" default="/camera/rgb/image_raw"/>
<arg unless="$(arg simulation)" name="rgb_topic" default="/camera/rgb/image_rect_color"/>
<arg if="$(arg simulation)" name="depth_topic" default="/camera/depth/image_raw"/>
<arg unless="$(arg simulation)" name="depth_topic" default="/camera/depth_registered/image_raw"/>
<arg name="camera_info_topic" default="/camera/rgb/camera_info"/>
<arg name="wait_for_transform" default="0.2"/>
<!--
robot_state_publisher's publishing frequency in "turtlebot_bringup/launch/includes/robot.launch.xml"
can be increase from 5 to 10 Hz to avoid some TF warnings.
-->
<!-- Navigation stuff (move_base) -->
<include unless="$(arg simulation)" file="$(find betago_navigation)/launch/3dsensor.launch">
<arg if="$(arg sw_registered)" name="depth_registration" value="false"/>
<arg unless="$(arg sw_registered)" name="depth_registration" value="true"/>
</include>
<!-- Move base -->
<include file="$(find ridgeback_navigation)/launch/include/move_base.launch" />
<!-- Mapping -->
<group ns="rtabmap">
<!-- Use RGBD synchronization -->
<!-- Here is a general example using a standalone nodelet,
but it is recommended to attach this nodelet to nodelet
manager of the camera to avoid topic serialization -->
<node pkg="nodelet" type="nodelet" name="rgbd_sync" args="standalone rtabmap_ros/rgbd_sync" output="screen">
<remap from="rgb/image" to="$(arg rgb_topic)"/>
<remap from="depth/image" to="$(arg depth_topic)"/>
<remap from="rgb/camera_info" to="$(arg camera_info_topic)"/>
<remap from="rgbd_image" to="rgbd_image"/> <!-- output -->
<!-- Should be true for not synchronized camera topics
(e.g., false for simulation, kinectv2, zed, realsense, true for xtion, kinect360)-->
<param name="approx_sync" value="false"/>
</node>
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="--delete_db_on_start">
<param name="frame_id" type="string" value="base_link"/>
<param name="subscribe_depth" type="bool" value="false"/>
<param name="subscribe_rgbd" type="bool" value="true"/>
<param name="subscribe_scan" type="bool" value="true"/>
<remap from="odom" to="/odometry/filtered"/>
<remap from="scan" to="/front/scan"/>
<remap from="rgbd_image" to="rgbd_image"/>
<param name="queue_size" type="int" value="15"/> <!--TODO how to set this value-->
<!-- output -->
<remap from="grid_map" to="/map"/>
<!-- RTAB-Map's parameters -->
<param name="RGBD/NeighborLinkRefining" type="string" value="true"/>
<param name="RGBD/ProximityBySpace" type="string" value="true"/>
<param name="RGBD/AngularUpdate" type="string" value="0.01"/>
<param name="RGBD/LinearUpdate" type="string" value="0.01"/>
<param name="RGBD/OptimizeFromGraphEnd" type="string" value="false"/>
<param name="Grid/FromDepth" type="string" value="false"/> <!-- occupancy grid from lidar -->
<param name="Reg/Force3DoF" type="string" value="true"/>
<param name="Reg/Strategy" type="string" value="1"/> <!-- 1=ICP -->
<!-- ICP parameters -->
<param name="Icp/VoxelSize" type="string" value="0.05"/>
<param name="Icp/MaxCorrespondenceDistance" type="string" value="0.1"/>
<!-- localization mode -->
<param if="$(arg localization)" name="Mem/IncrementalMemory" type="string" value="false"/>
<param unless="$(arg localization)" name="Mem/IncrementalMemory" type="string" value="true"/>
<param name="Mem/InitWMWithAllNodes" type="string" value="$(arg localization)"/>
</node>
<!-- visualization with rtabmapviz -->
<node if="$(arg rtabmapviz)" pkg="rtabmap_ros" type="rtabmapviz" name="rtabmapviz" args="-d $(find rtabmap_ros)/launch/config/rgbd_gui.ini" output="screen">
<param name="subscribe_depth" type="bool" value="true"/>
<param name="subscribe_scan" type="bool" value="true"/>
<param name="frame_id" type="string" value="base_link"/>
<param name="wait_for_transform_duration" type="double" value="$(arg wait_for_transform)"/>
<remap from="rgb/image" to="$(arg rgb_topic)"/>
<remap from="depth/image" to="$(arg depth_topic)"/>
<remap from="rgb/camera_info" to="$(arg camera_info_topic)"/>
<remap from="scan" to="/front/scan"/>
</node>
</group>
</launch>
The rviz snapshot is: 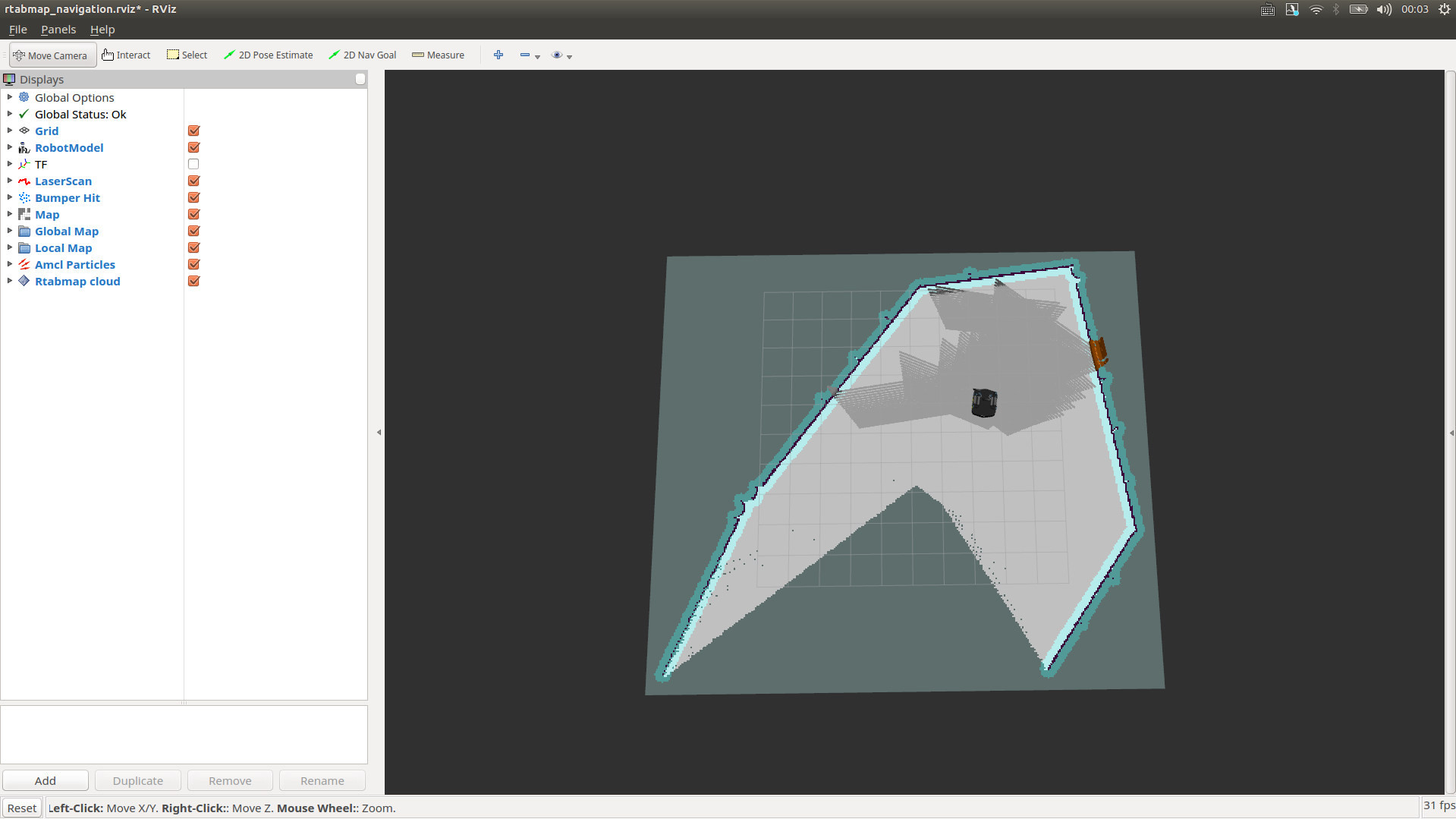 The node graph is below, sorry, the picture needs to be this big to see clearly: 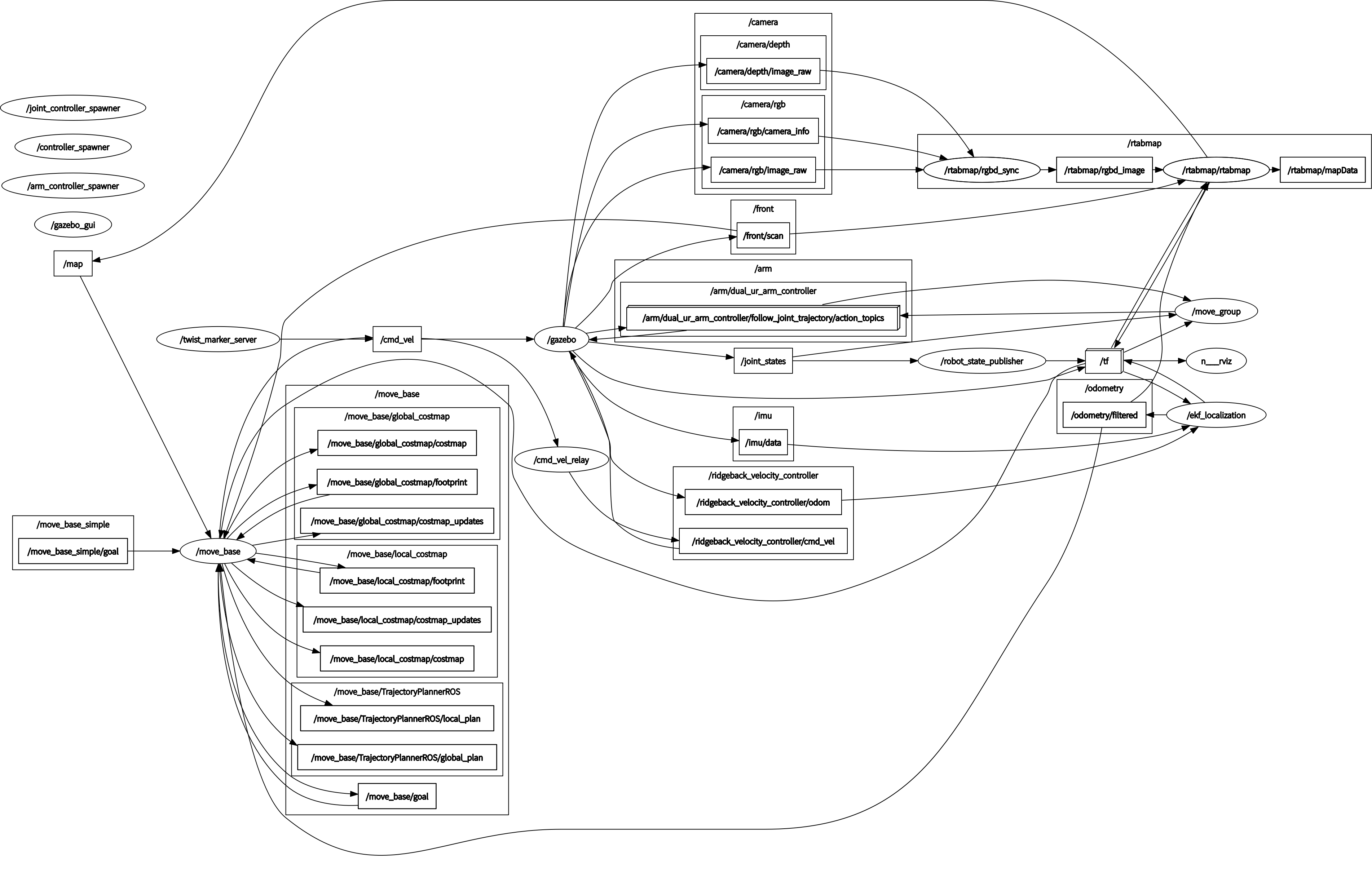
|
|
Administrator
|
Hi,
it is pretty much what you say :) You are using /odometry/filtered as odometry (which seems to be the output of your EKF). rtabmap node is subscribing to laser scan and RGBD/ProximityBySpace is enabled, so proximity detection with lidar is enabled. EDIT: show the MapGraph in RVIZ, it will help to see proximity detections as yellow links. |
Re: Does laser and rgbd camera work in odometry estimation?
|
|
Hello Mathieu,
Thanks for your reply, I think I get it. |
«
Return to Official RTAB-Map Forum
|
1 view|%1 views
| Free forum by Nabble | Edit this page |