Hi,
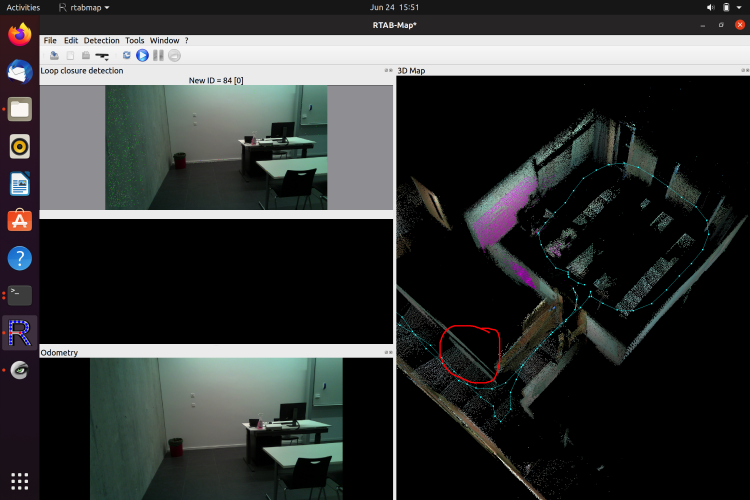
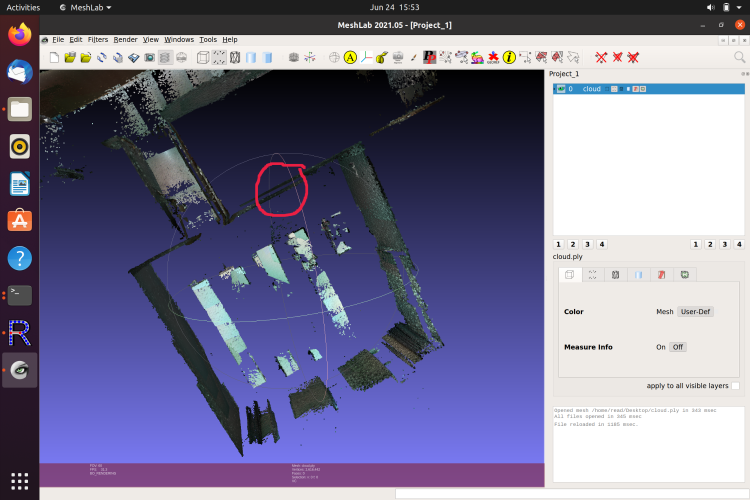
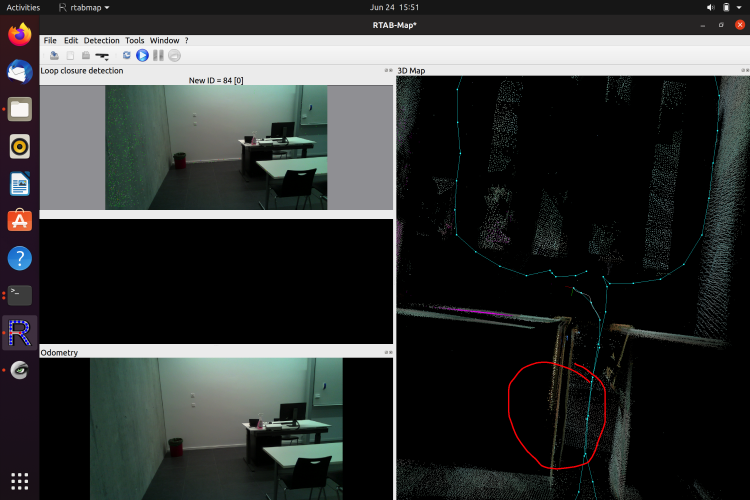
The double walls can be caused either by odometry drift or not so accurate transformation between the cameras, or both.
There is also no loop closures detected. For visual loop closure detection, you should traverse the same areas in same camera orientation. In your trajectory, there is an overlap in the trajectory, but in not the same direction, so no visual loop closures can be detected.
It is possible to calibrate the extrinsics between the camera using the Calibrate Extrinsics button in latest rtabmap version:
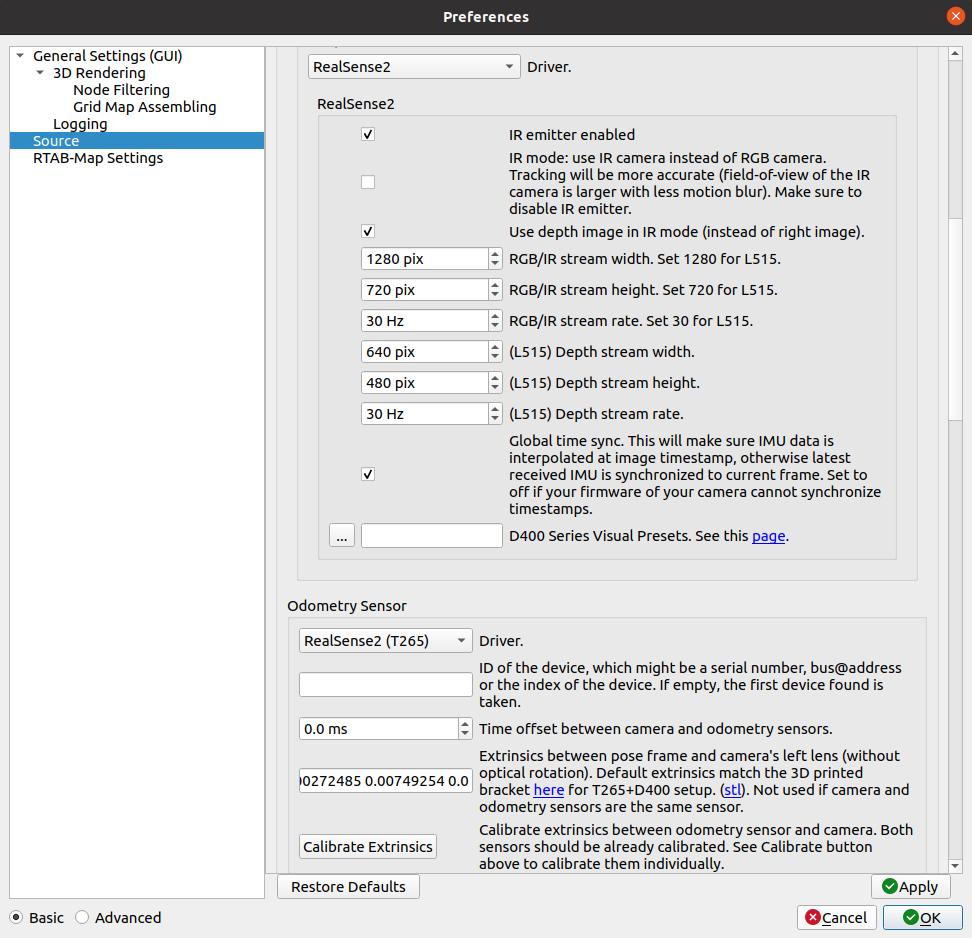
To make it work, you will need to
calibrate the T265 (with realsense sdk 2.42, newest sdks have this
issue), then do the extrinsics calibration.
cheers,
Mathieu