Hello!
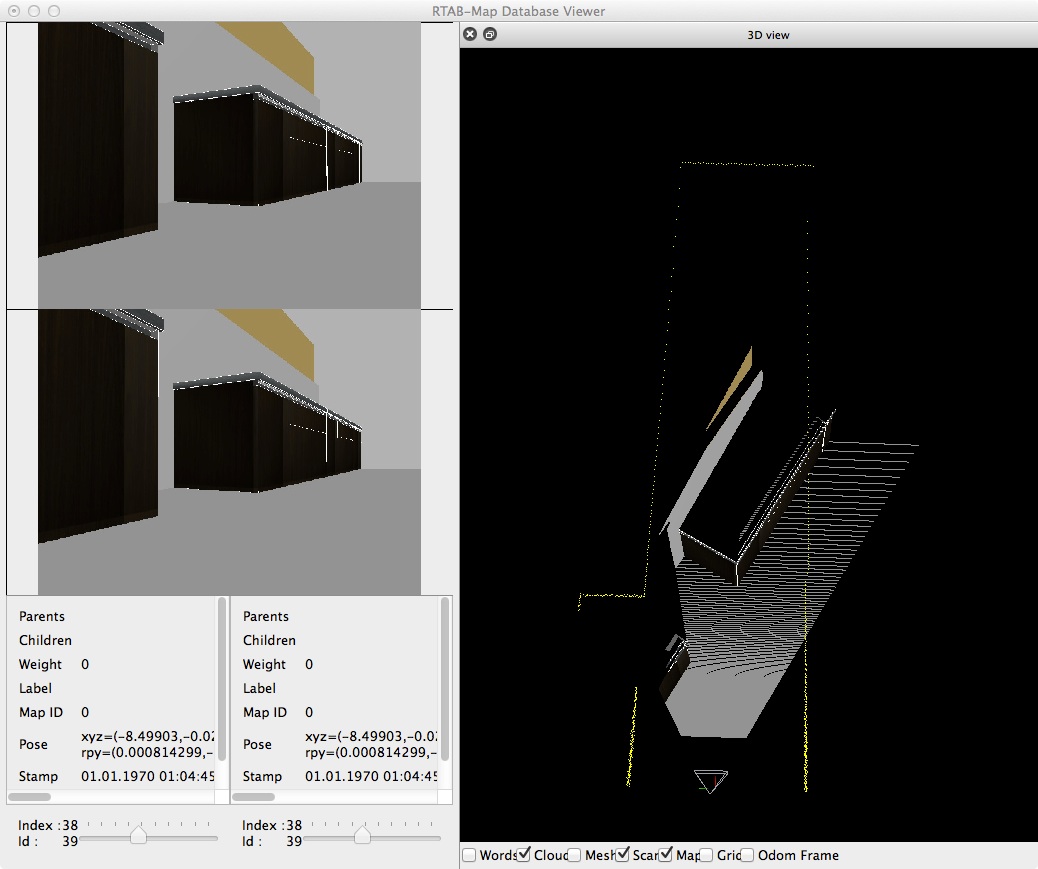
I'm trying to set up RTAB-Map (Kinect + Laser + Odometry) for doing Navigation with the Turtlebot robot, and everything seems to work OK except for an issue when creating the 3D Map. The issue is that it adds some wrong depth images, like if it is linking them with wrong odometry data. Here you can see an image of the error:

This issue seems to happen more often if I move the turtlebot robot at higher speeds, or when I do turns. You can see here in the 2D Map how it should be, without the displaced walls:

I've already checked the robot configurations (odometry, laser, kinect...) and everything seems to be working OK. As for the rtabmap_ros configuration, I'm using the following launch file:

I would appreciate any kind of help with the issue.
Thanks!