Thx for the new link, I understand now exactly what is the problem!
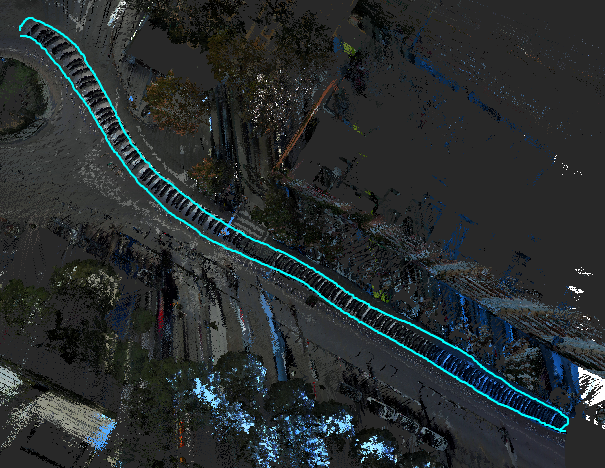
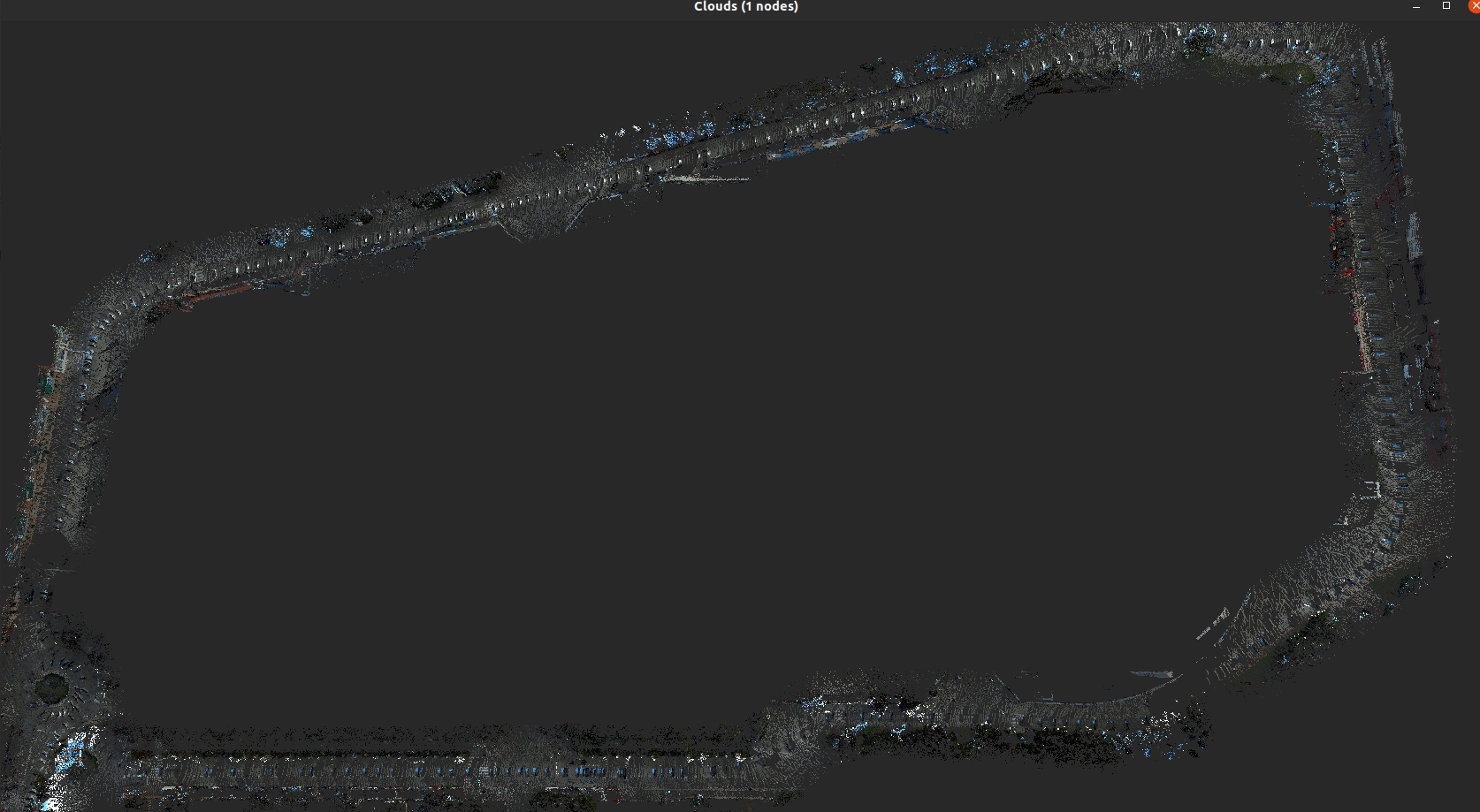
My previous comment was about if the lidar was hitting its own car, causing floating points while moving, which could be filtered by the footprint filtering approach, but it is not the case here. The lidar is not hitting the car, only following cars sometimes like this one:

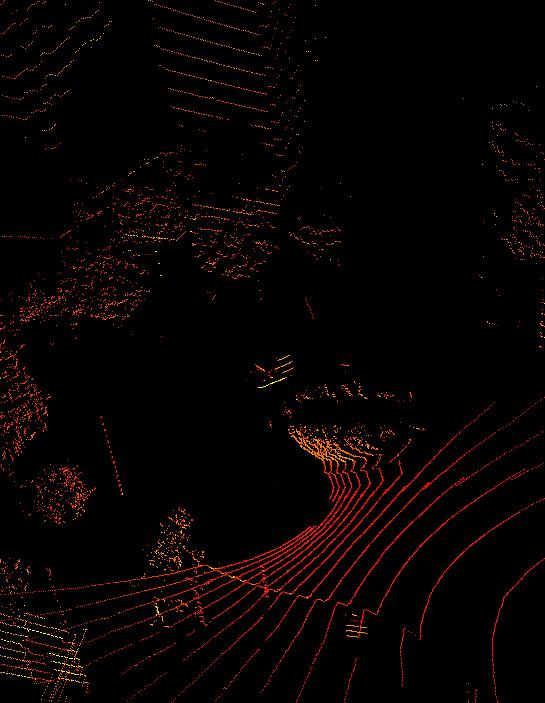
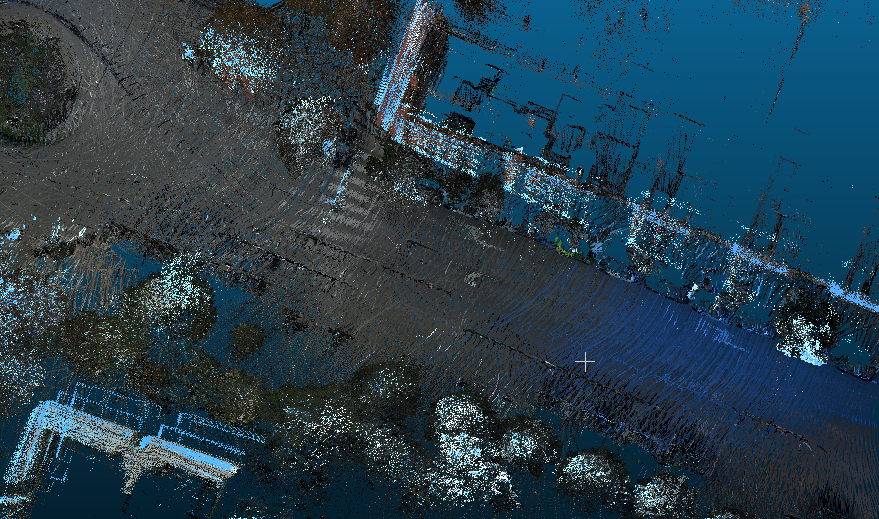
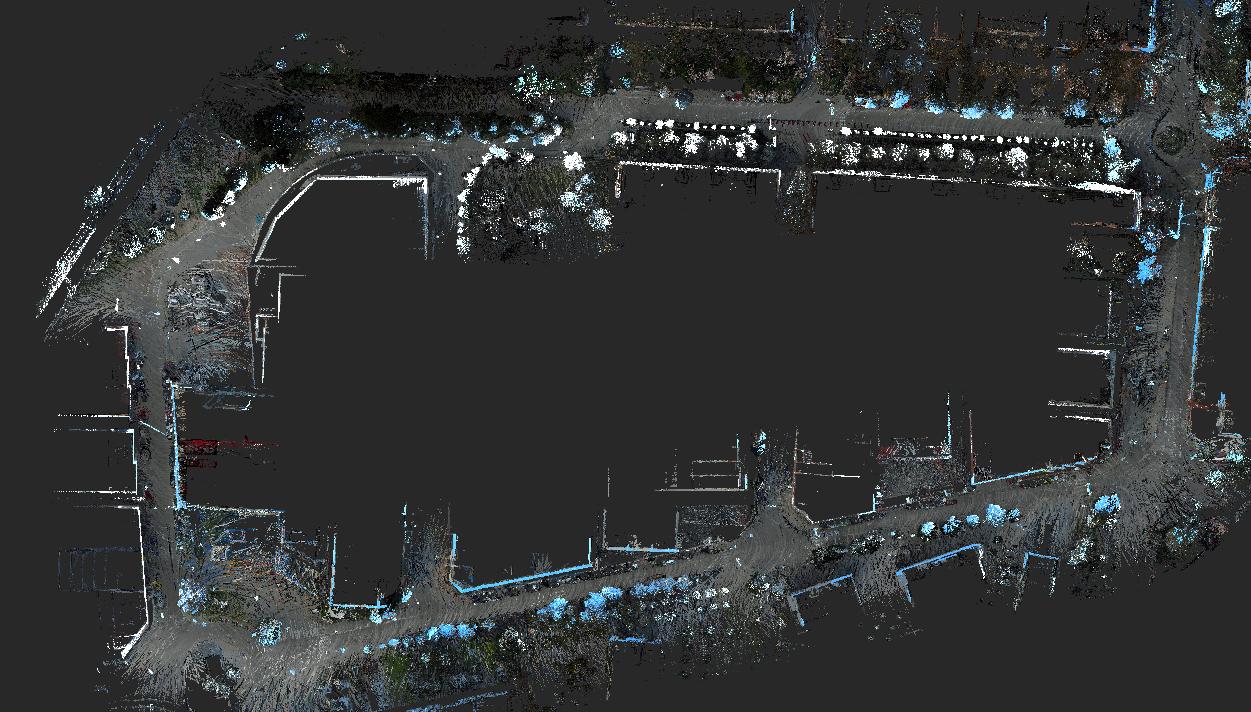
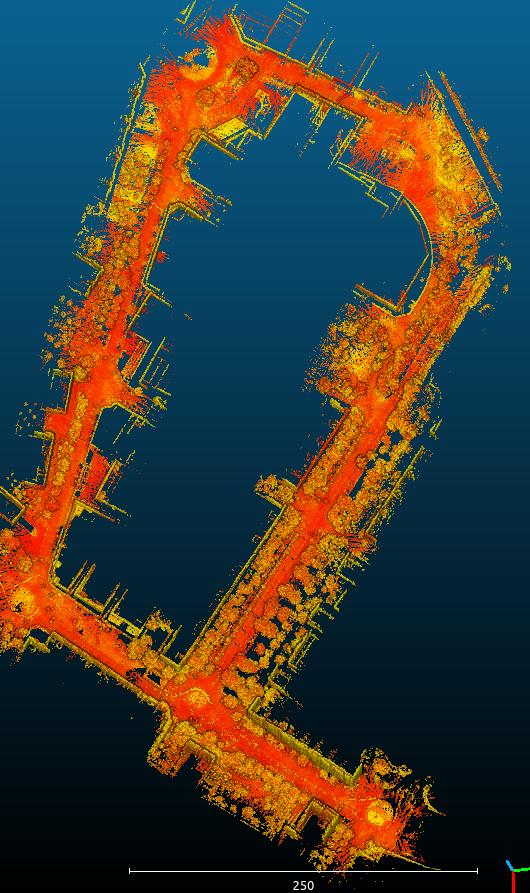
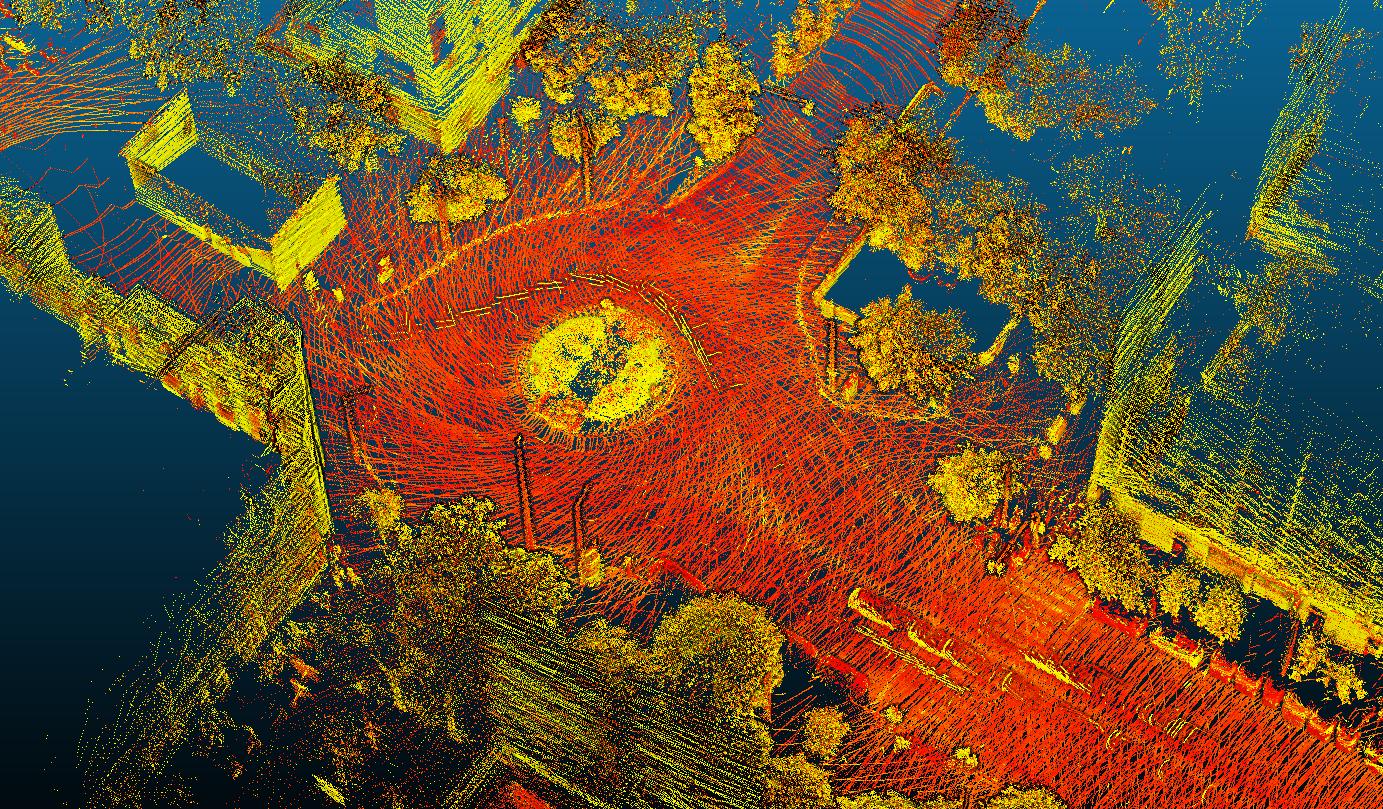
This kind of ghosting (following cars) cannot be filtered in post-processing with current options in rtabmap, here is the intensity point cloud:
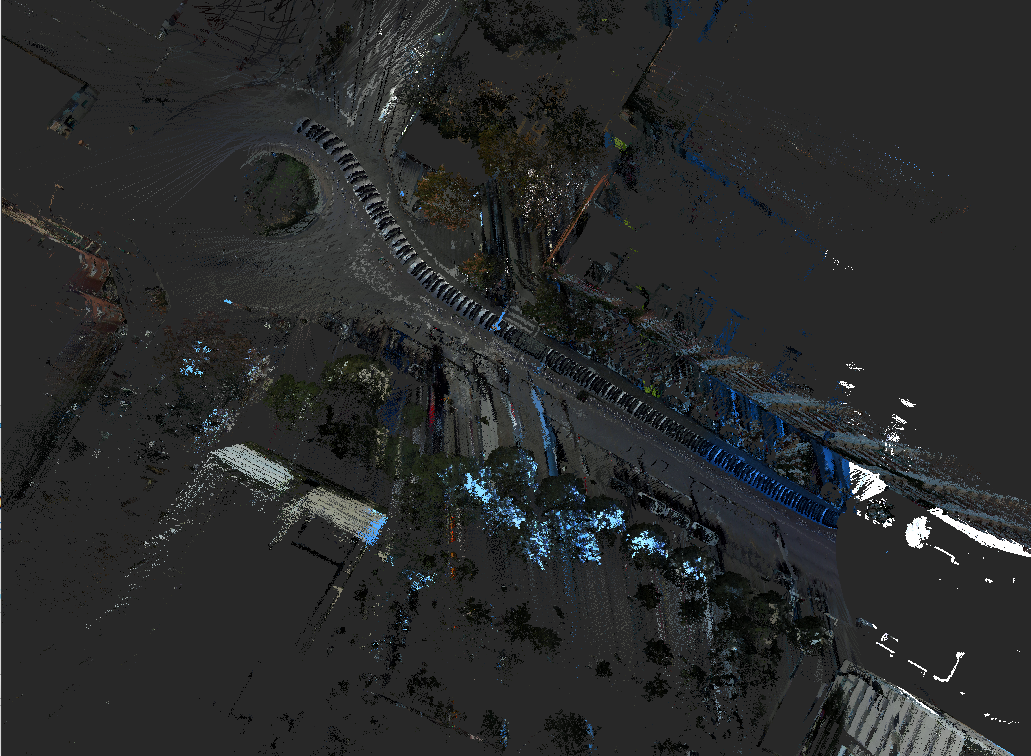
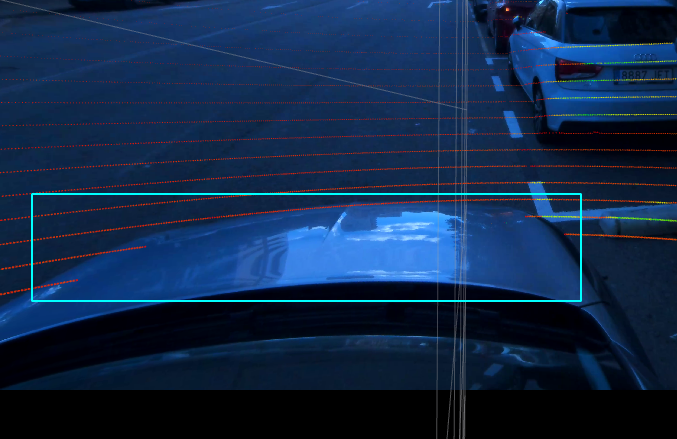
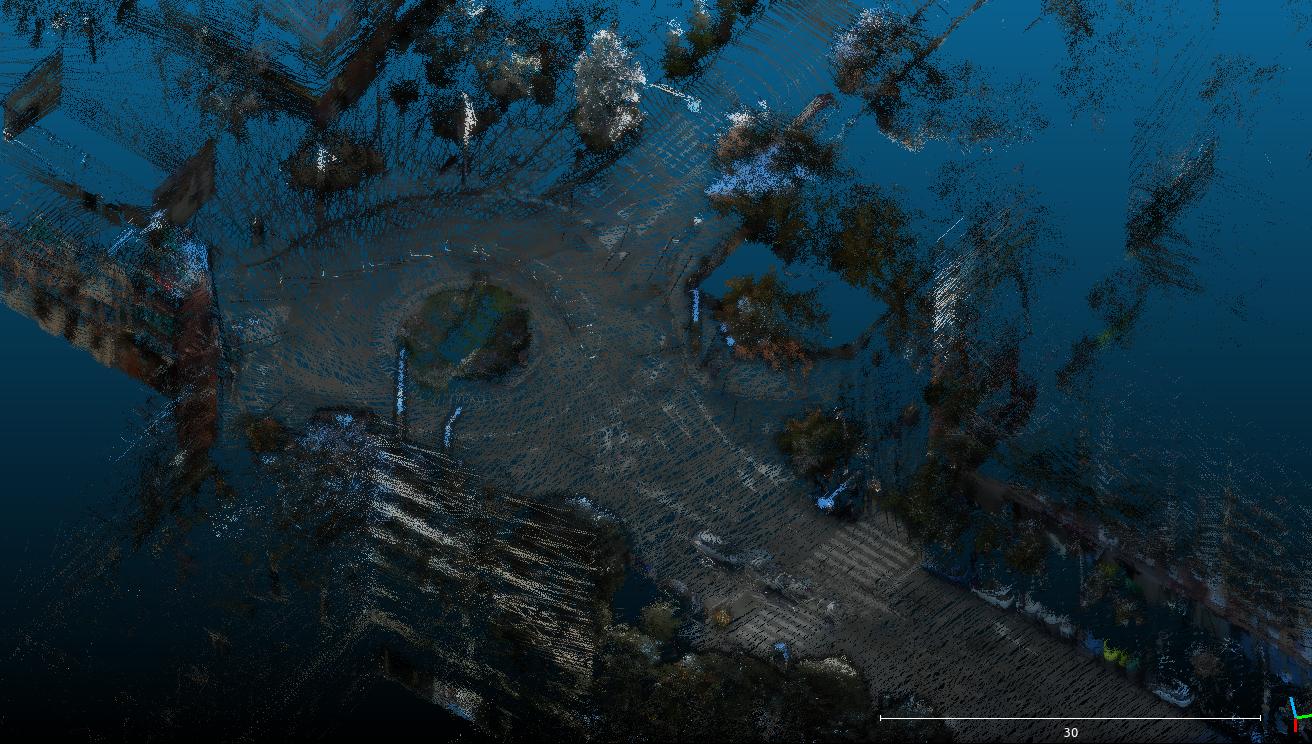
So back to main issue, points on the road are colored with color from the car's hood. In the fourth camera, we see the hood at the bottom all the time, so the hood is like painted on the road.

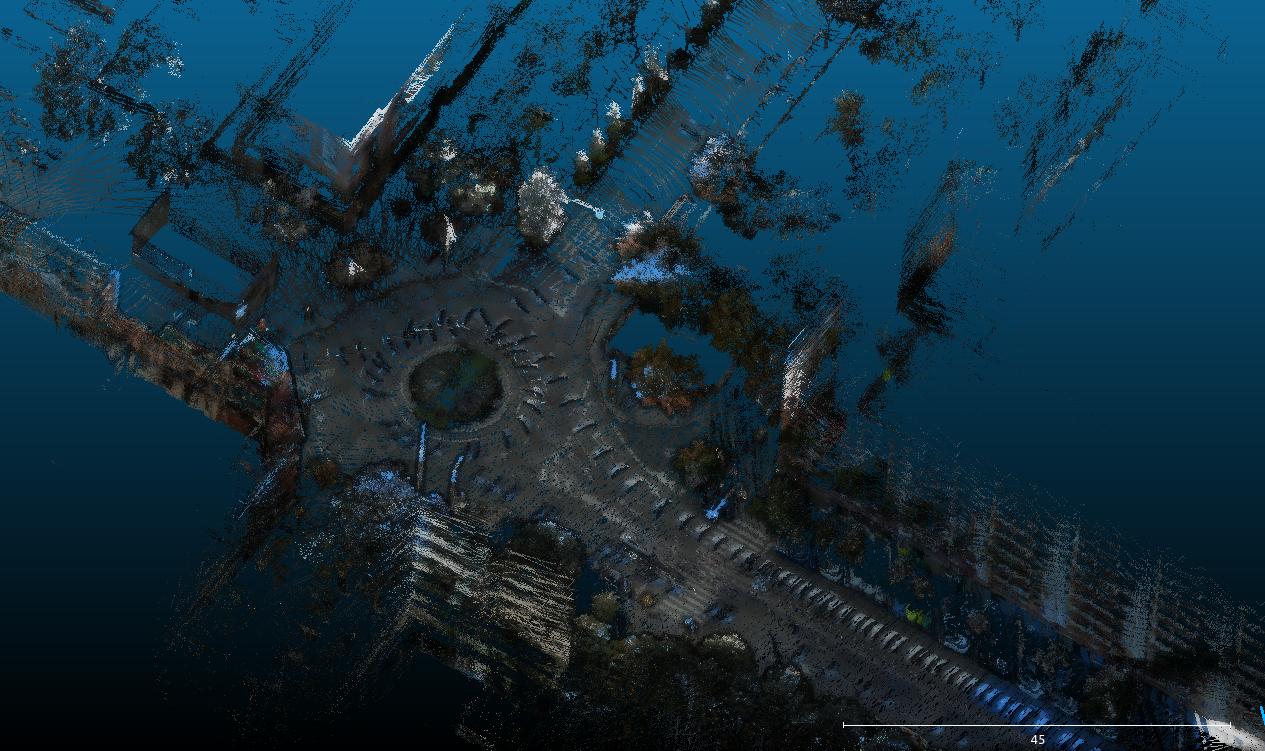
By setting the ROI ratios to "0 0 0 0.4" in camera projection options, we can avoid painting the hood on the road (this is the approach I used in this video
https://www.youtube.com/watch?v=vKCTg4plPkw when exporting the colored point cloud to filter the hood of the car):
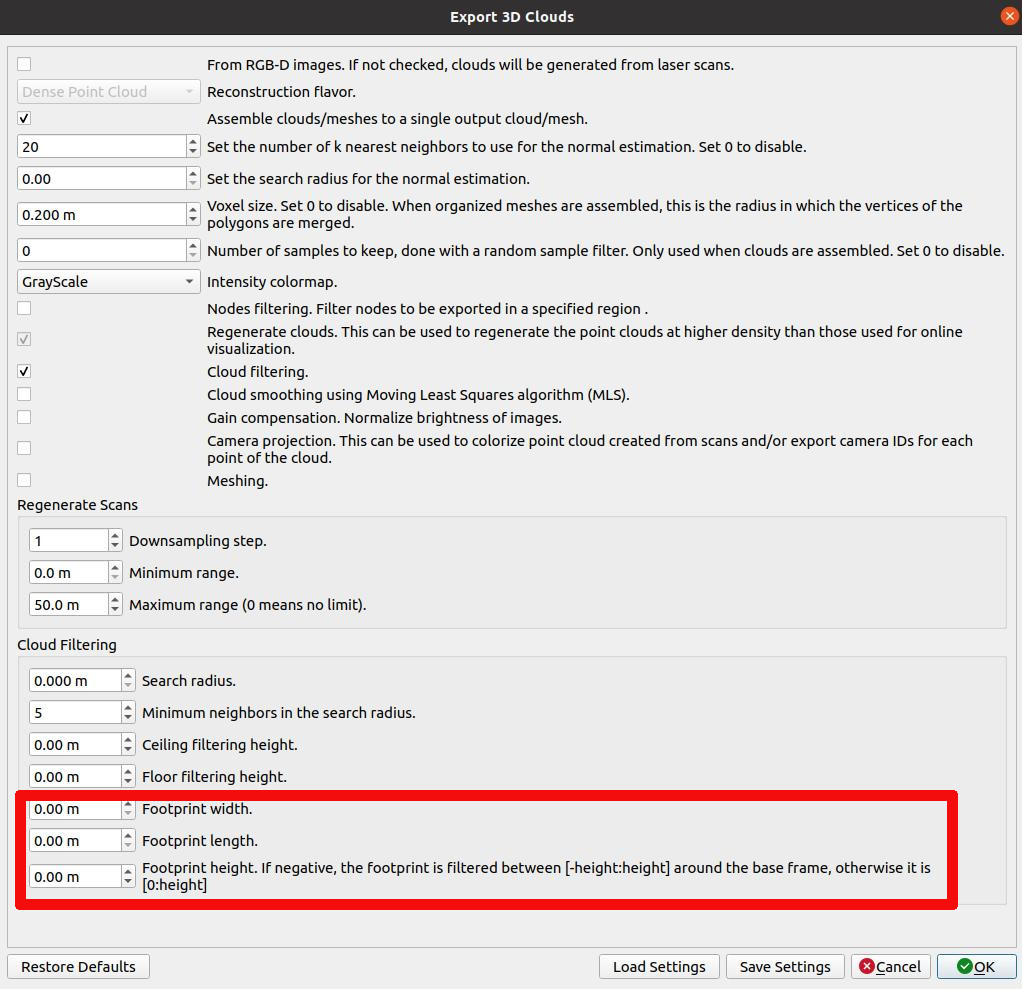
However, this approach has the disadvantage to filter bottom 40% of all images from all four cameras. I implemented a new option in this
commit to add a mask to only ignore the hood during the reprojection. Here is the mask I used that you can download (note the hood is on the fourth camera):

Regards,
Mathieu