I did a small review of the similar options between the tools. Hopefully this guide will help to know why poses may differ.
There are four flavors (numbering them like rtabmap-export):
0. Full Global Optimization (default for rtabmap-export and rtabmap-report)
1. Iterative Global Optimization (default for rtabmap-databaseViewer)
2. Local Graph Optimization: this one gives the optimized poses saved in the database (no re-optimization)
3. No optimization or Odometry.
For rtabmap-report, it does only 0 or 1 (with --inc option), so the poses would likely be slightly different each time.
For rtabmap-databaseViewer, here is the mapping with rtabmap-export:

To get odometry poses in rtabmap-databaseViewer, we should move the iteration slider fully on left. The poses exported would be always the ones rendered in the Graph View. Note that if there is GPS or Ground truth and the corresponding checkbox to "Align to GPS" or "Align to Ground Truth" is true, the poses may also be different. If you export clouds or poses, it should also use the same poses that are rendered in Graph View.
For your use-case, rtabmap-report is not really useful. You should use either rtabmap-databaseViewer or rtabmap-report to get the poses and cloud matching together. With rtabmap-export:
rtabmap-export --cloud --poses rtabmap.db
If you want to match poses between rtabmap-databaseViewer and rtabmap-export, use "--opt 2"
rtabmap-export --cloud --poses --opt 2 rtabmap.db
In rtabmap-databaseViewer, select "Local Optimized":
Choose RGB-D SLAM + ID format to export with landmarks. They will appear at the end. The export poses should be identical between the two tools:
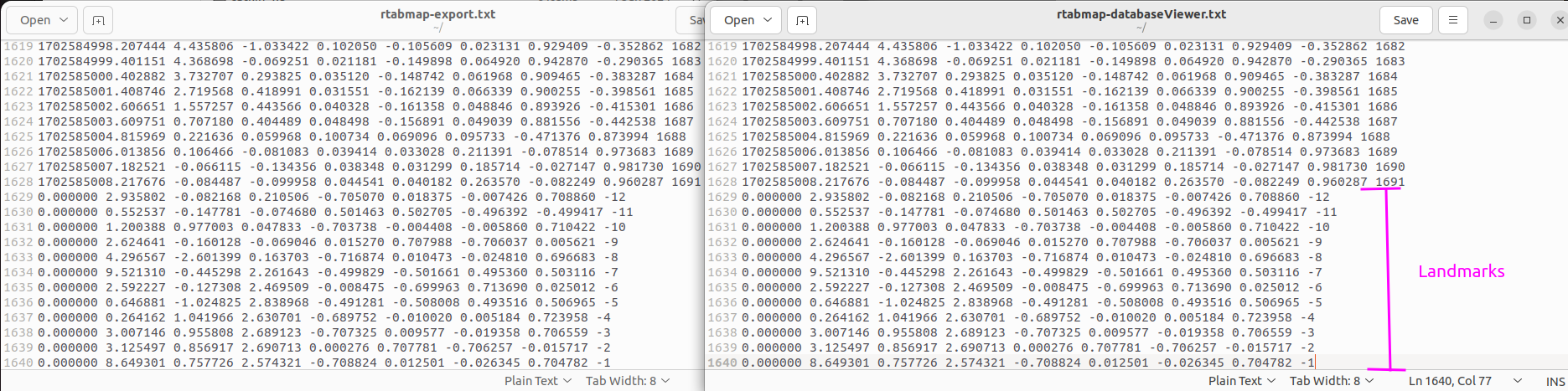
I see that you need the poses of the camera (not base frame) and the landmarks at the same time. To get both, you must use "--poses" and "--poses_camera" and crop only the end of the first file. I saw that the export would fail when using --poses_camera if there are landmarks. I
updated rtabmap-export so that you can do this instead:
rtabmap-export --poses_camera --poses_landmark --cloud --opt 2 rtabmap.db
You will get a file with poses in camera frame (without landmarks), with another file with only landmark poses.
cheers,
Mathieu