Hi,
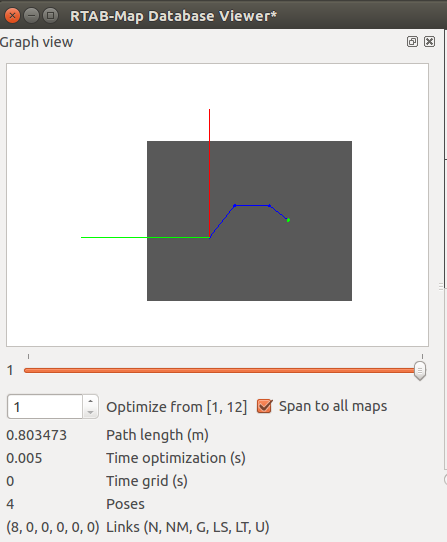
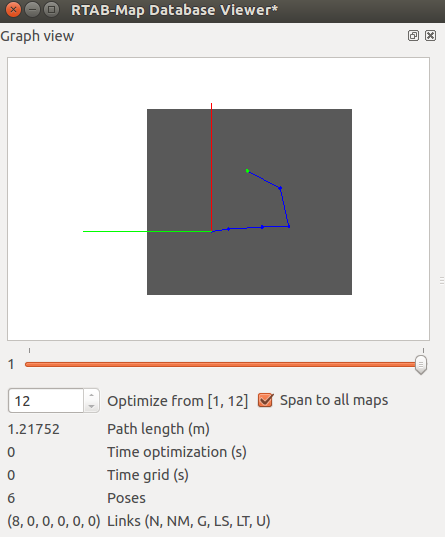
The only way to export multiple sessions separately is to use the database viewer tool. When opening a database with the Database Viewer, open the Graph View panel (View->Graph view). On the "Optimize from" box, set the node id you want to optimize the map. In this small example, I did 2 independant small maps (hitting Reset odometry while mapping and making sure there a re no loop closures between maps):
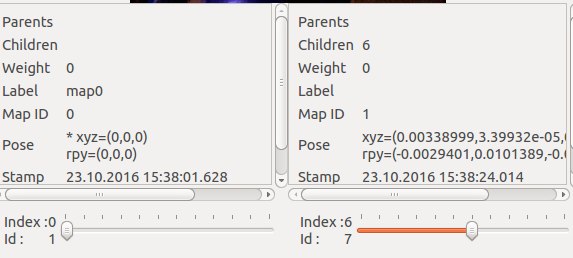
You can see in the other panel to which map the nodes belong (under "Map ID" label):
Then when you hit the Export cloud or View cloud options, the current graph is used to assemble the map. You can save separately the point cloud of the different sessions. Unfortunately, the database viewer doesn't have as many options than RTAB-Map app. I
opened an issue for that.
cheers,
Mathieu

