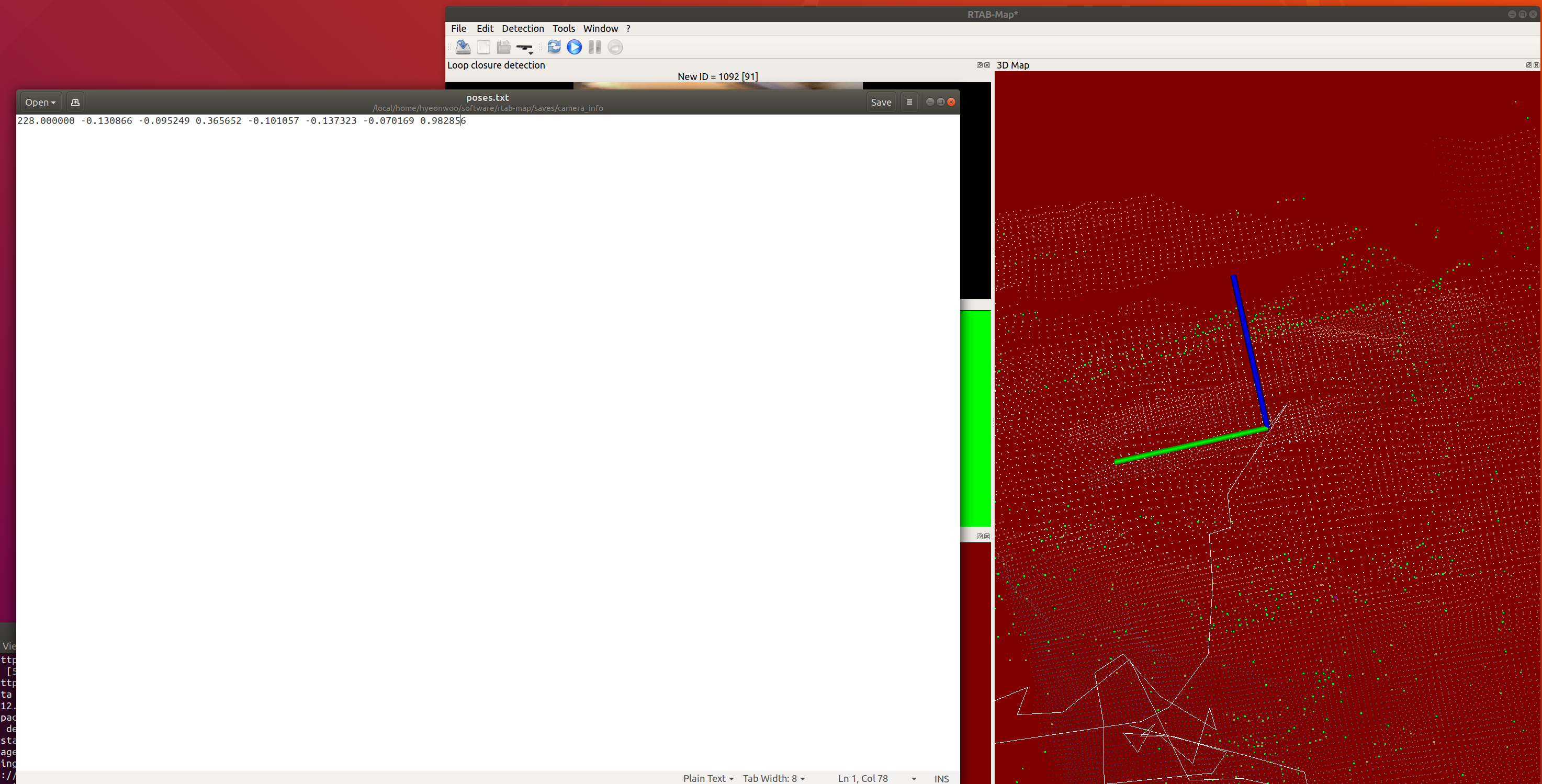
When odometry is reset, unless there is a loop closure with previous map, the graph will contain only poses of the last map. In your case, if odometry has been reset just before the last frame, the graph will contain only one pose.
I just
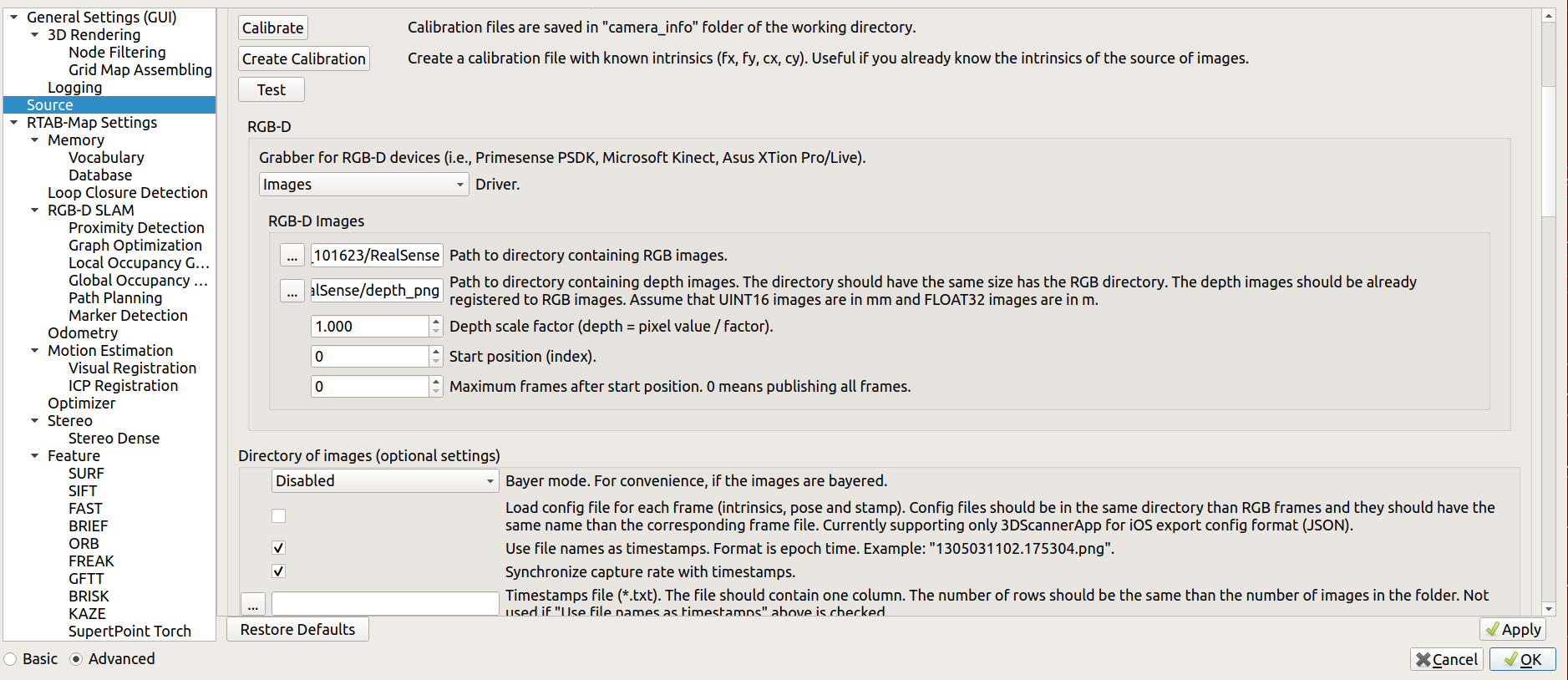
added a new option in rtabmap-databaseViewer to export raw odometry poses, independently if there are multiple disconnected maps in the database. When doing File->export poses..., you will have this question:
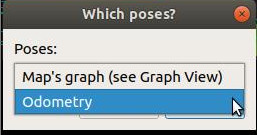
By default it will be the graph poses, but you can switch to odometry.
cheers,
Mathieu