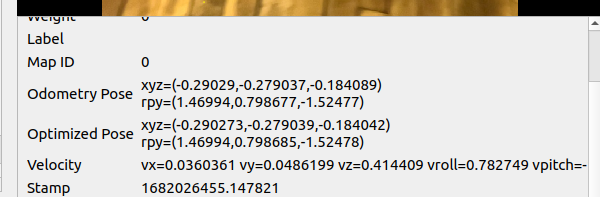
Hello, I'm slightly confused with the "odometry pose"
I'd like to extract the position of the camera from my .db files.
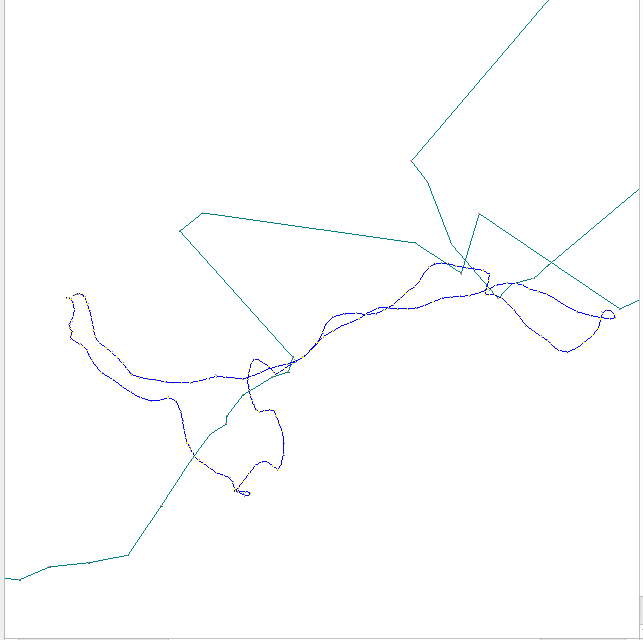
(I think the blue "graph" path looks like what I had...)
I tried file->export poses-> different formats
But when I compared my exported data with the timestamp to the Odometry pose, they don't seem to match?
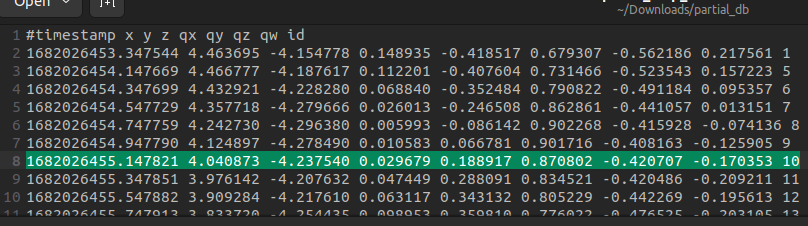
Also at start, my exported data says I'm at (4,-4,0) but in databaseViewer it sayd I'm near (0,0,0).
Could you help clarify the differences?
references (?) :
https://answers.ros.org/question/238705/extract-odometry-and-map-from-db-file-on-tango/https://github.com/introlab/rtabmap_ros/issues/389

