Hi,
When running the find_object_3d example using
$ roslaunch freenect_launch freenect_launch.launch depth_registration:=true
$ roslaunch find_object_2d find_object_3d.launch
$ rosrun rviz rviz
I receive persistent warnings of the form
[ WARN] [1489930130.781721522]: Lookup would require extrapolation into the future. Requested time 1489930130.251293115 but the latest data is at time 1489930129.751276853, when looking up transform from frame [object_30] to frame [map]
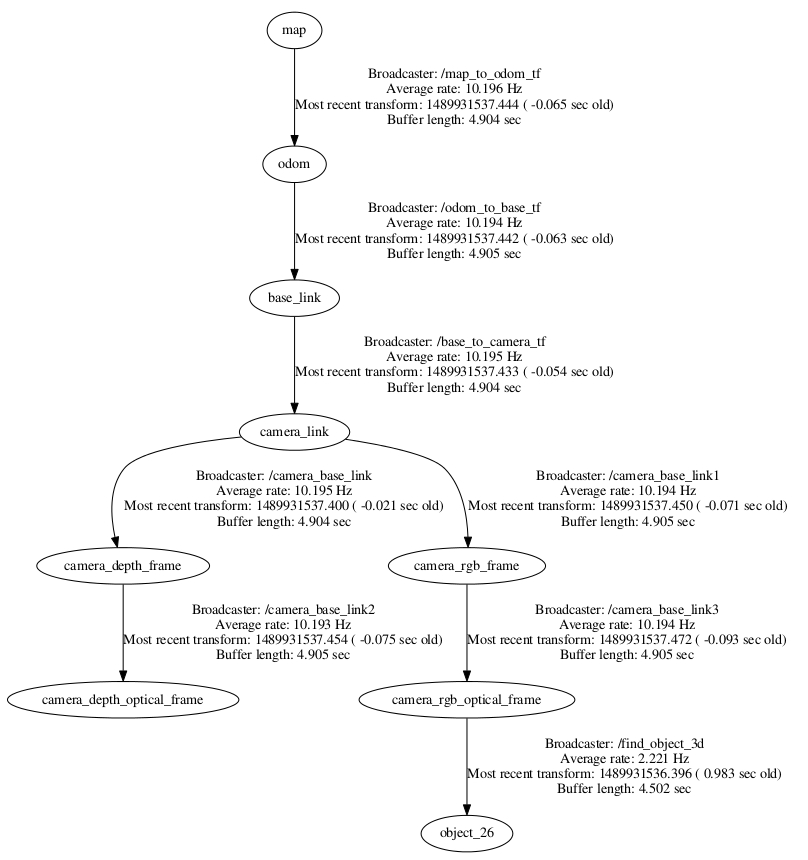
Looking at the output from tf view_frames below, it seems that find_object_3d is publishing at a slower rate than the static transform publishers. Is the issue that find_object is trying to use the latest transforms from /map_to_odom_tf etc, which don't sync with its own latest transform? How can I fix this?
Many thanks for your help!