Hi,
Is the camera fixed on a robot, or is it hand-held (or on an UAV)? In the first case, if the TFs are correctly set (ground matches the bottom of the point cloud), it would work as the robot mapping demo above.
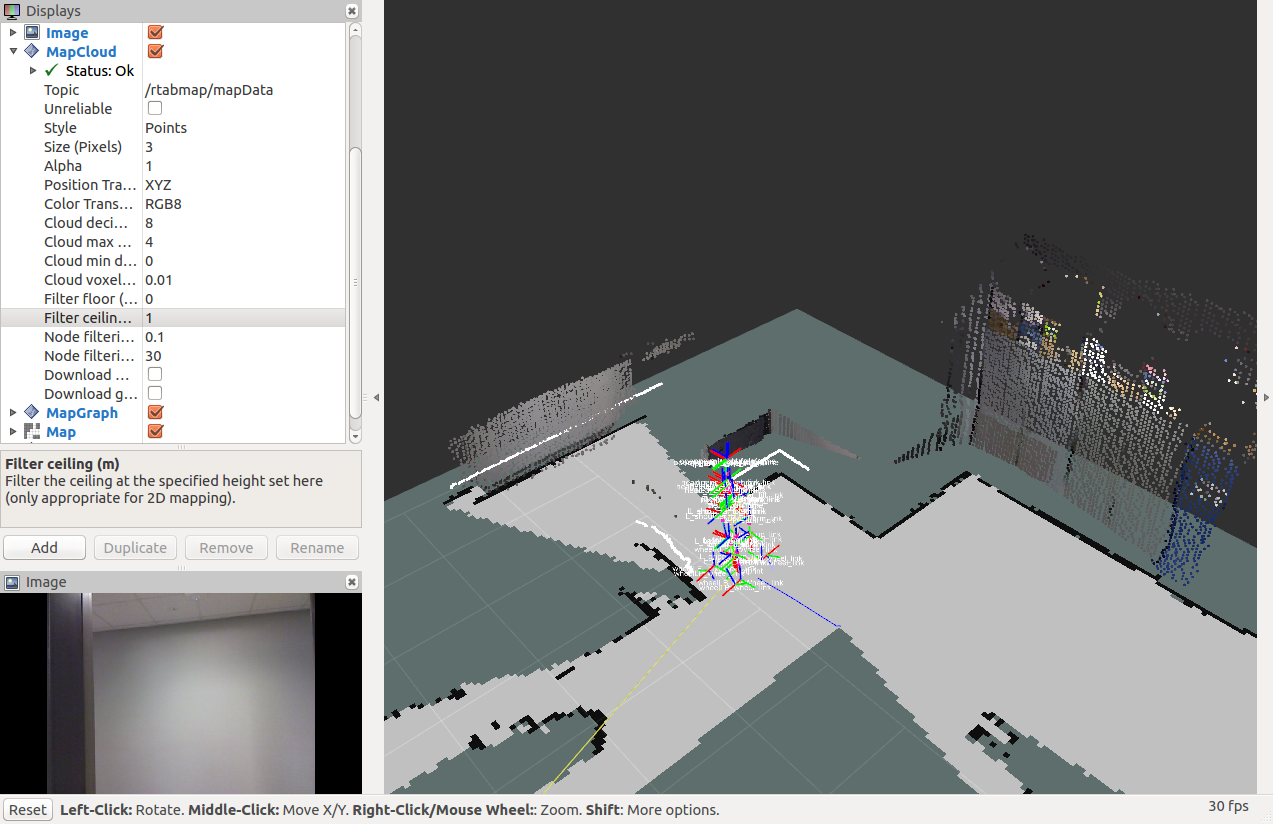
For the hand-held case, you must
update the code (small fix for MapCloud RVIZ plugin so that it performs filtering in /odom frame instead of /base_link frame), set "--Odom/AlignWithGround true" (make sure the camera is seeing the ground on initialization) and "--Grid/MapFrameProjection true" to get /cloud_map correctly filtered.
Example:
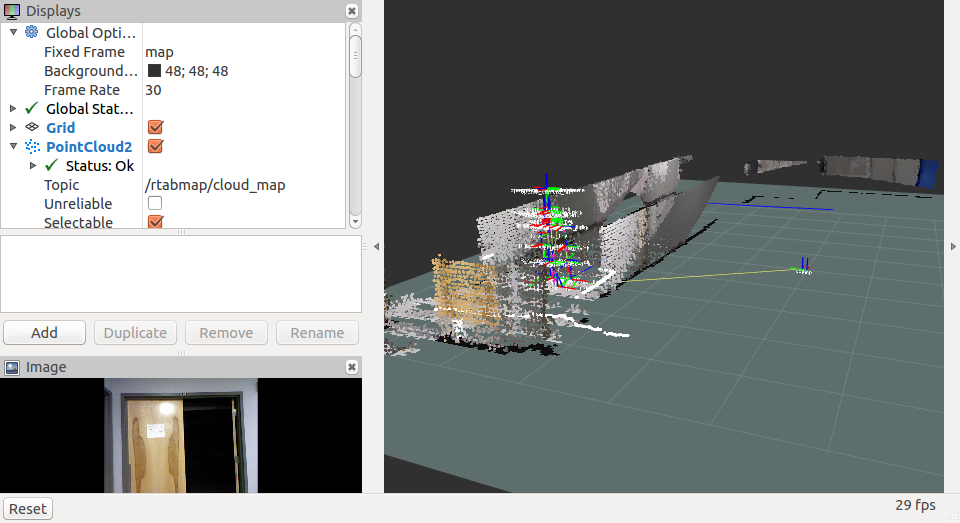
$ roslaunch freenect_launch freenect.launch depth_registration:=true
$ roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start --Odom/AlignWithGround true --Grid/MaxObstacleHeight 1 --Grid/MapFrameProjection true" rviz:=true rtabmapviz:=false
cheers,
Mathieu